讲座主题:由驾驶任务进阶至道路交通工程设计Part3:曲线路段情景之驾驶情节任务分析
日期:2021-09-05
讲座专家介绍:徐耀赐,博士、副教授。1979年毕业于台湾中央大学土木工程系,1989年取得美国马里兰大学土木工程博士学位。曾任职美国马里兰大学桥梁工程中心、美国康州工程顾问公司,长期从事道路、交通工程规划与设计,是美国注册之土木工程技师(PE)。1999年,入选世界土木工程名人录。
会议截图
1 绪论
本次讲座,徐老师重点介绍了曲线路段情景的驾驶情节任务分析(Task Analysis of Curve Driving,TACD)(图1)。首先对道路平曲线线形、曲度、竖曲线类型等基本定义进行简单介绍,明确基本概念及重要作用。驾驶人的目视空间受到三度空间的影响,包括平面线形、纵断线形以及横断面的影响。道路交通工程是三度空间的设计,几何线形则是保证交通安全与确保设计容量的先天基因。道路几何线性设计均须符合渐变原理,且对道路平、纵组合线形须谨慎对待。例如在长直线段之后不可接小半径曲线,因为驾驶任务的内涵量变化太大,会增加驾驶难度,造成安全隐患。
图1 曲线路段驾驶任务分析
驾驶人凭借目视、主观认知前方道路线形并操控车辆。驾驶人在面对单一曲线段、连续曲线段、曲线段变化至其它几何线形的情形,面临的驾驶任务有明显差异,因此道路交通工程规划设计者必须深入了解“驾驶任务”的内涵,采用不同的设计思维开展道路交通工程设计。(图2)。
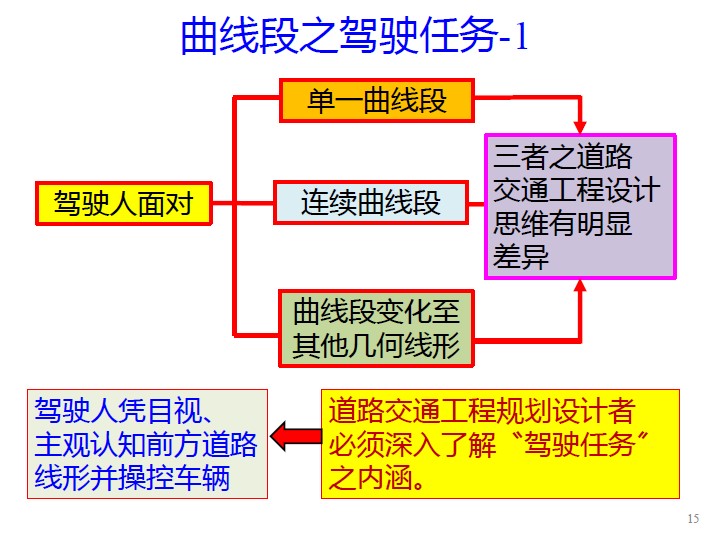
图2 曲线段驾驶人面对的驾驶情景
驾驶任务主要分为三个层次,其一为控制(Control),驾驶人本身操控车辆;其二为指引(Guidance),车辆与前后左右车辆及周边道路环境存在互动关系,与人、车、路皆有关;其三为运行(Navigation),道路交通工程师将道路、城市、地区等相关信息(标志、标线等)传递给驾驶人(图3)。
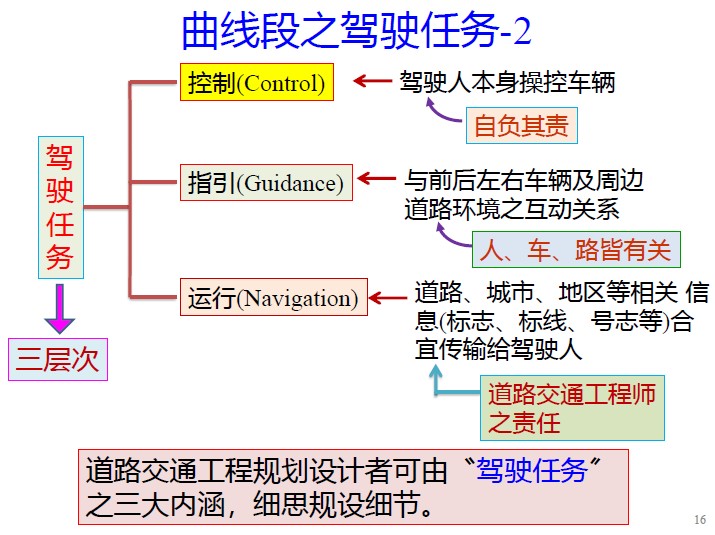
图3 驾驶任务的三个层次
此外,曲线段还需要考虑各种次任务,包括视觉需求、车辆控制需求、有效信息模式、期望效应、速度选择等(图4),其中视觉需求及车辆控制需求最为重要。比较直线段与曲线段的各种驾驶次任务,可以发现,曲线半径越小,驾驶负荷(DWL)越大,驾驶场景难度(Difficult of Driving Scenarios,DDS)也越大。任何道路几何线形的变化都不能违背驾驶人预期效应,在进行交通工程规划设计时,对人因理论与驾驶任务的困难度要进行充分的考虑与掌握。
图4 曲线段的驾驶次任务
最后,徐老师强调了名义安全和实质安全两个概念(图5)。名义安全是面向现实的,但由于设计准则众多,部分准则本身可能有瑕疵或不完整,因此名义安全是“满足大部分安全条件”,绝对不可能达到“绝对安全”的境界。实质安全则是比名义安全更高层次的安全境界,趋向于绝对安全,也仍无法实现绝对安全,不过从安全角度而言,实质安全对应的事故风险已经大幅减少了。从名义安全进阶到实质安全,除却参考几何线形设计准则外,还需要充分考虑道路安全本身,应意识到符合设计规范的设计不见得符合实质安全的要求。
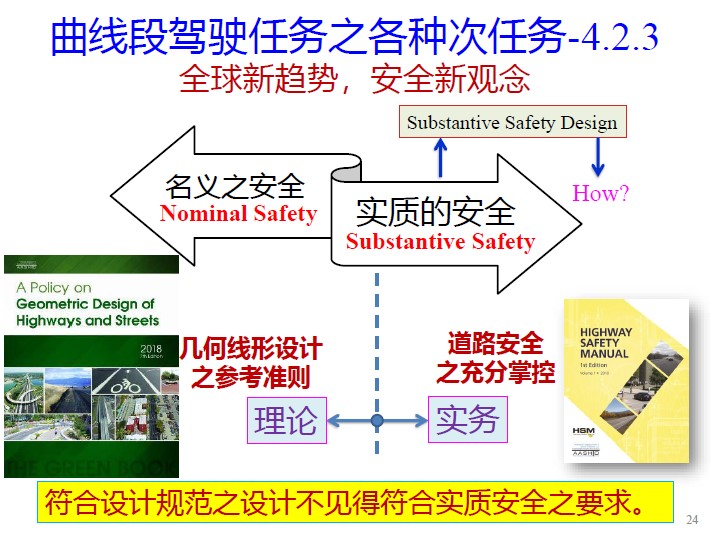
图5 名义安全与实质安全
2 视觉需求(Visual Demands)
由于驾驶人的驾驶行为在极大层面上是基于视觉得到的信息,视觉需求在驾驶任务中占极重要的地位。视距设计时,AASHTO提出3.4m/s2的舒适刹车(comfortable deceleration),即减速过程中应避免驾驶人急刹动作。驾驶任务中最忌讳的就是没有掌握好速度变化,造成驾驶人紧急刹车。
2.1 视区条件
如果驾驶在直线路段,驾驶人的视区范围是对称的,转向时分为远视区与近视区,并根据驾驶时间和天气呈现不同,随着道路几何线形而持续变化(图6)。在连续曲线处,视区变化会更加频繁。在进行道路交通工程规划设计时,设计者一般仅能考虑到无前车遮挡情况下的前视区,这与驾驶人行驶时的视区不同。以同向多车道弯道处视距为例,应考虑到路肩处可能存在的故障车辆,故应对曲线路段路肩视距进行检核。
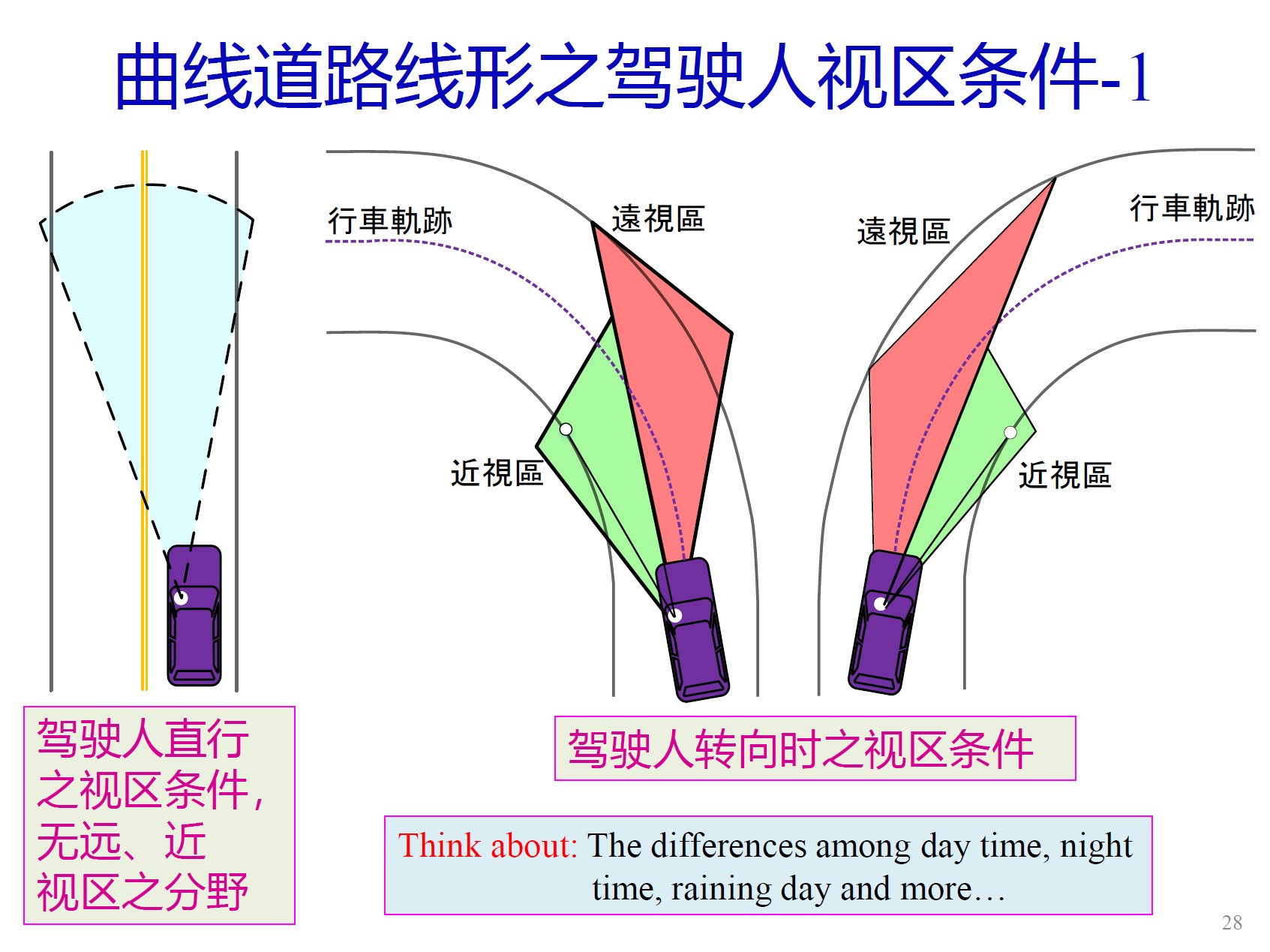
图6 驾驶人视区条件
2.2 视觉传输
道路交通工程规划设计者需要将道路整体信息传递给用路人。道路整体信息包括标志、标线、道路线形等正式信息以及环境、建筑等非正式的信息,90%以上的信息都是依靠视觉传递给驾驶人的。当视距或视区不足时,道路整体信息无法较好地传递给用路人,即视觉传输功能无法全然发挥,则会造成安全隐患。故徐老师提出,就道路交通规划与设计而言,视觉传输重点在于严格把握“有效信息模式”的理念(图7)。
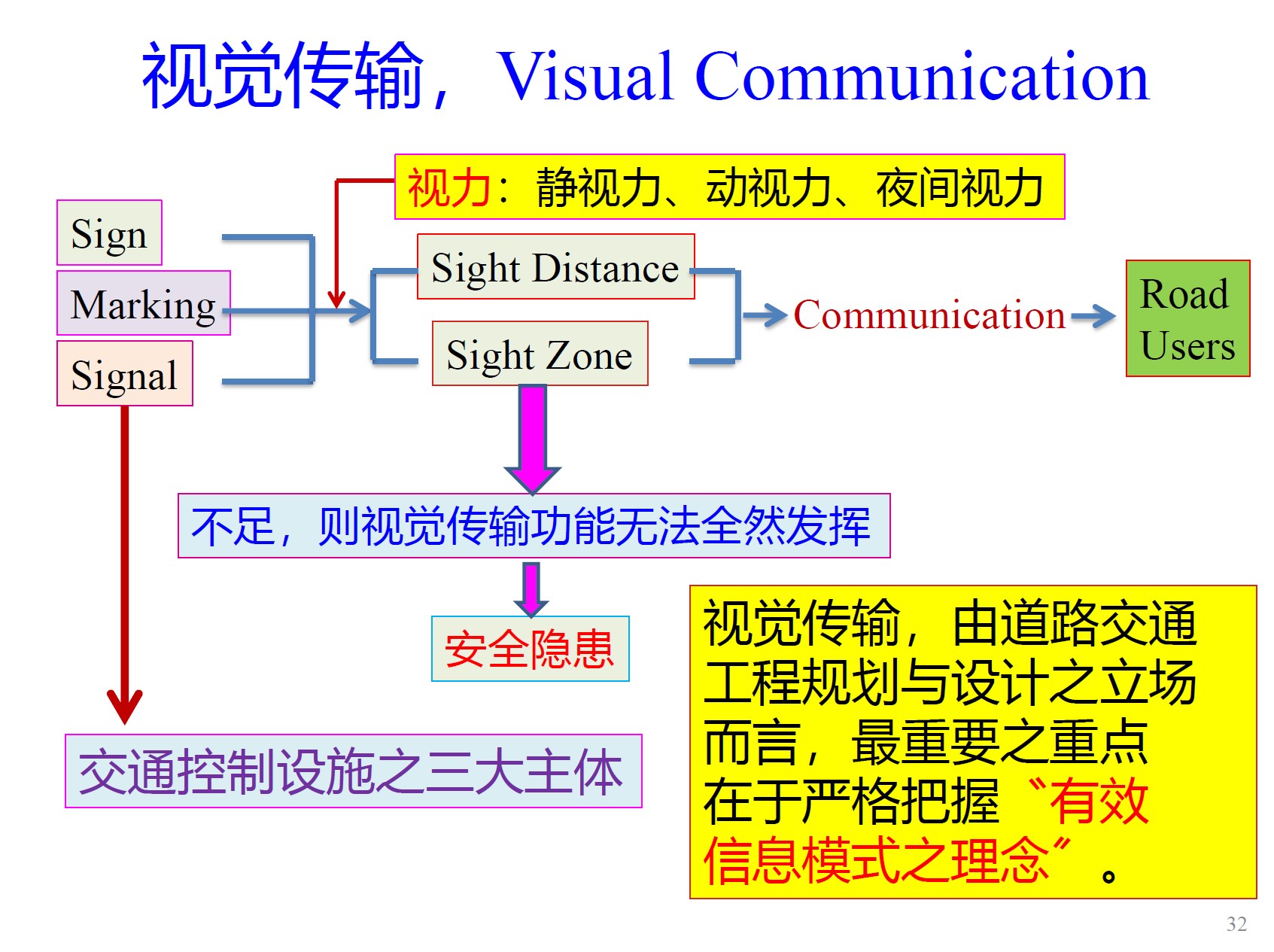
图7 视觉传输
2.3 有效信息模式
何为有效信息模式?徐老师提出,有效信息模式(Effective Information Modes)指的是信息对于辅助驾驶人完成驾驶任务是有效且有益的,故需要注意到信息的信息量、信息位置以及信息内容的设置。对驾驶任务无益,甚至是有害的信息应尽量少布设(图8)。
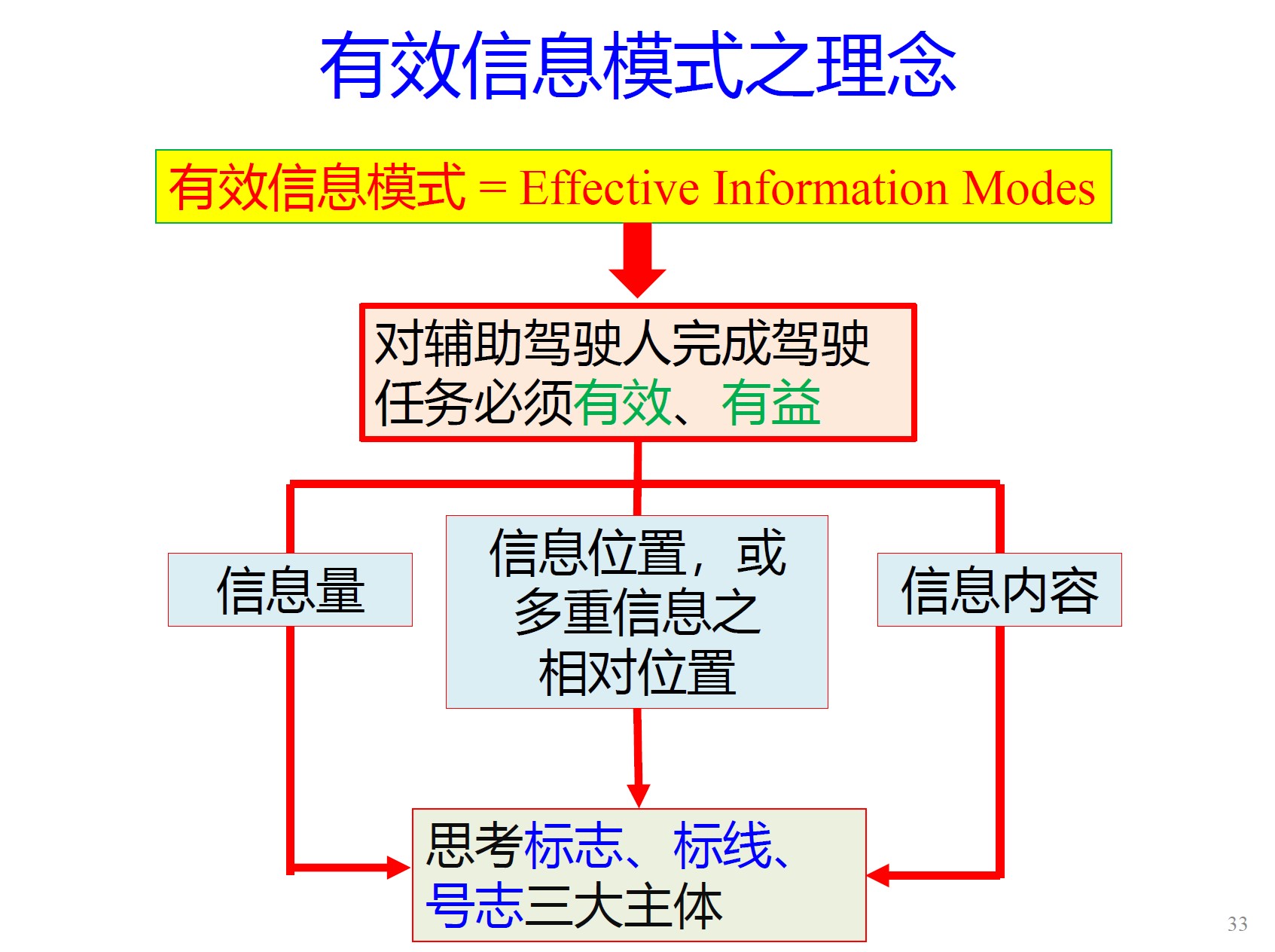
图8 有效信息模式的理念
驾驶人在进行驾驶任务过程中,会自然搜寻道路所提供的信息(驾驶员视觉范围内),而部分道路信息是随时变化的,因此道路规划设计者需要向用路人提供一目了然、简单、合乎法规、合乎驾驶人期望的信息。有效信息是指对驾驶员完成驾驶任务有正面帮助的信息,如标志、标线、线形诱导标等。信息过载、与驾驶任务无关、造成Driving Dilemma的信息均为无效信息(图9)。
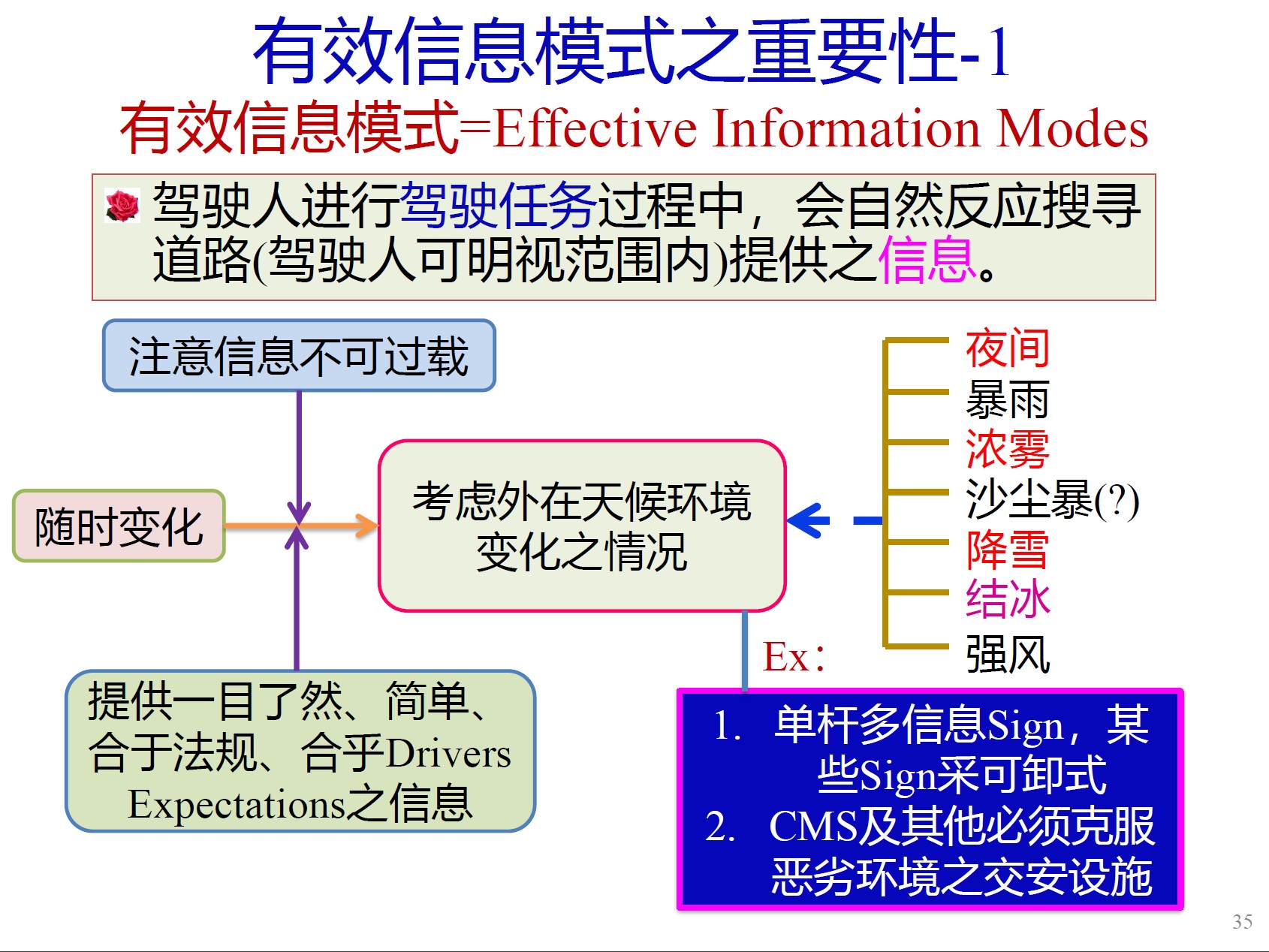
图9 有效信息模式的重要性-1
此外,除有效信息思维外,另一个重点思维是对驾驶人最有意义的信息(Most Meaningful Information,MMI)。驾驶人面对道路信息时,其认知-反应时间(Perception-Reaction Time,PRT)很短,数秒之间必须做出正确的决策,故信息必须有效且有意义。在不同道路条件下,道路交通设计者也需要思考符号、文字、图案中,哪种表现形式更有效(图10)。
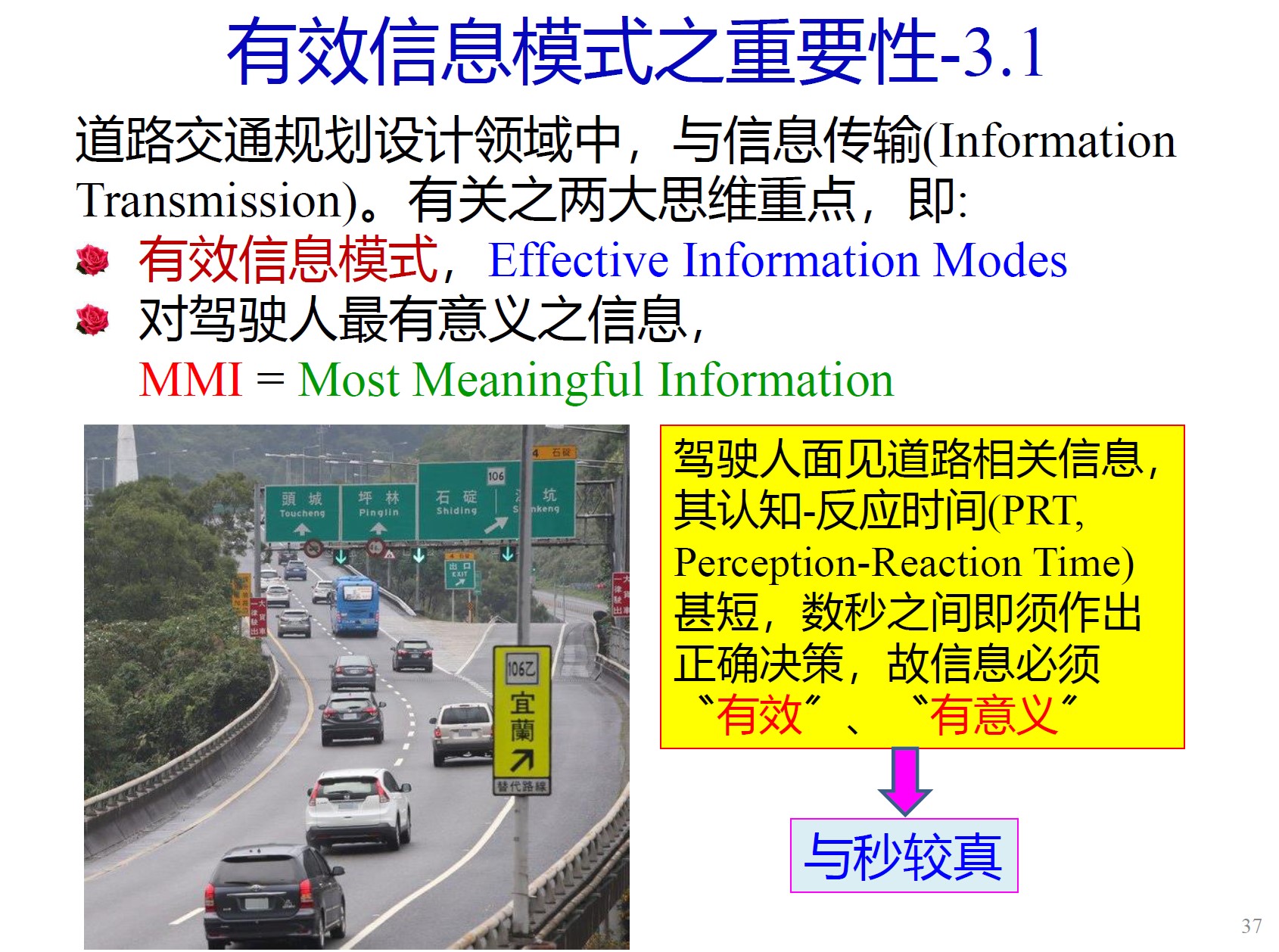
图10 对驾驶人最有意义的信息(MMI)
以法国道路标志为例(图11),弯道驾驶时驾驶人最需要注意的是控制车辆沿着弯道前行,将距离标志布设在此处属于与辅助驾驶任务无关的信息,驾驶人主观上会排斥,甚至完全忽略信息,信息在其脑中毫无记忆留存(Memory Effect)。所以,道路交通工程设计者应充分考虑不同路段有效信息的布设,标志布设位置、内容,皆应搭配驾驶任务。
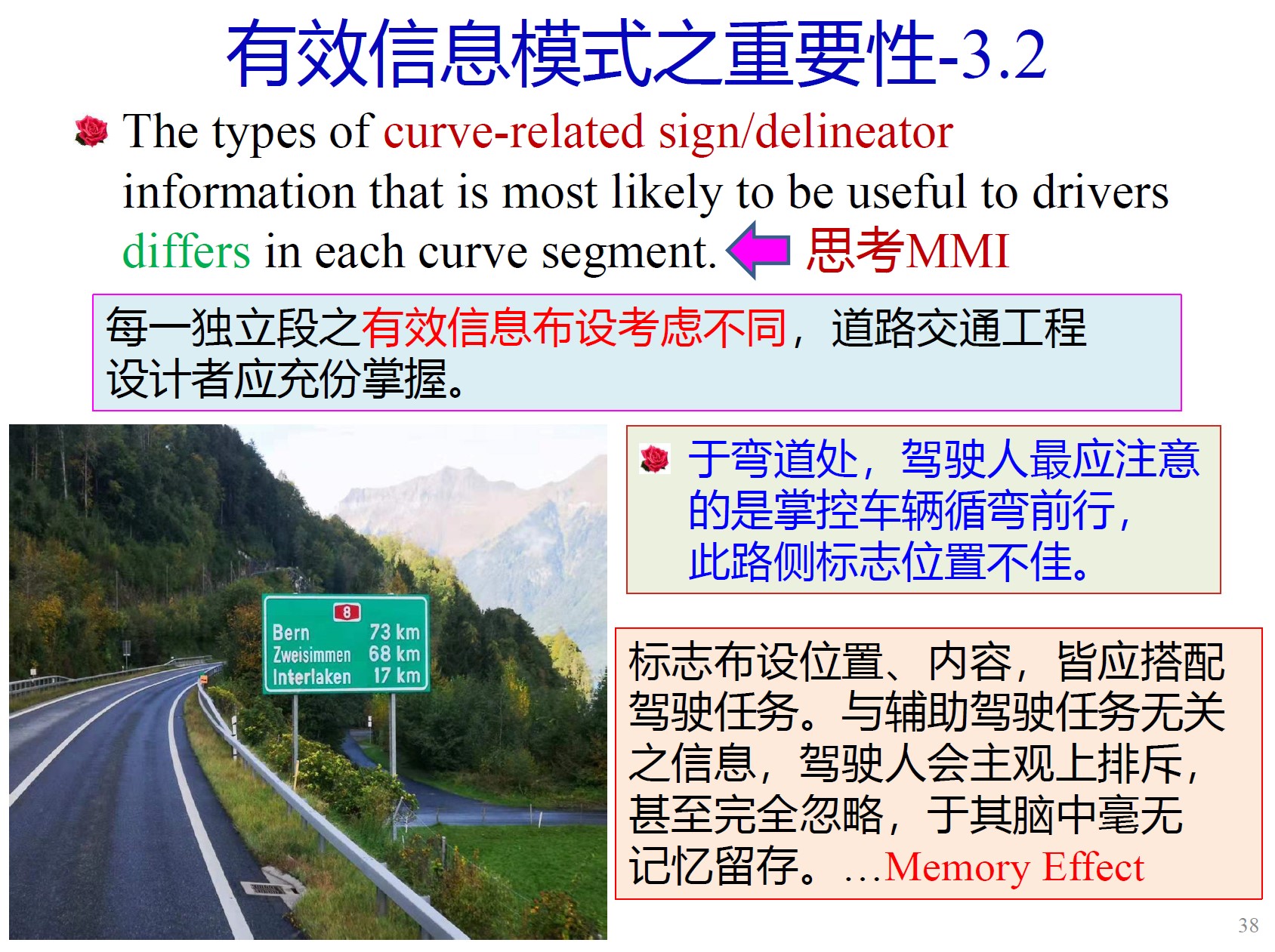
图11 法国道路标志案例
MMI是Human Factor中的重点,没有意义的标志是对资源的浪费,缺少道路交通工程和管理的内涵。交通工程师需要考虑,路径指引标志设计的时候,驾驶人最需要的MMI是什么?并考虑其背后的驾驶任务,TADS等思维。人因和驾驶任务需完整结合起来,逐渐发展成为驾驶情节任务分析(Task Analysis of Driving Scenarios,TADS),并从中思考有效信息模式(图12)。
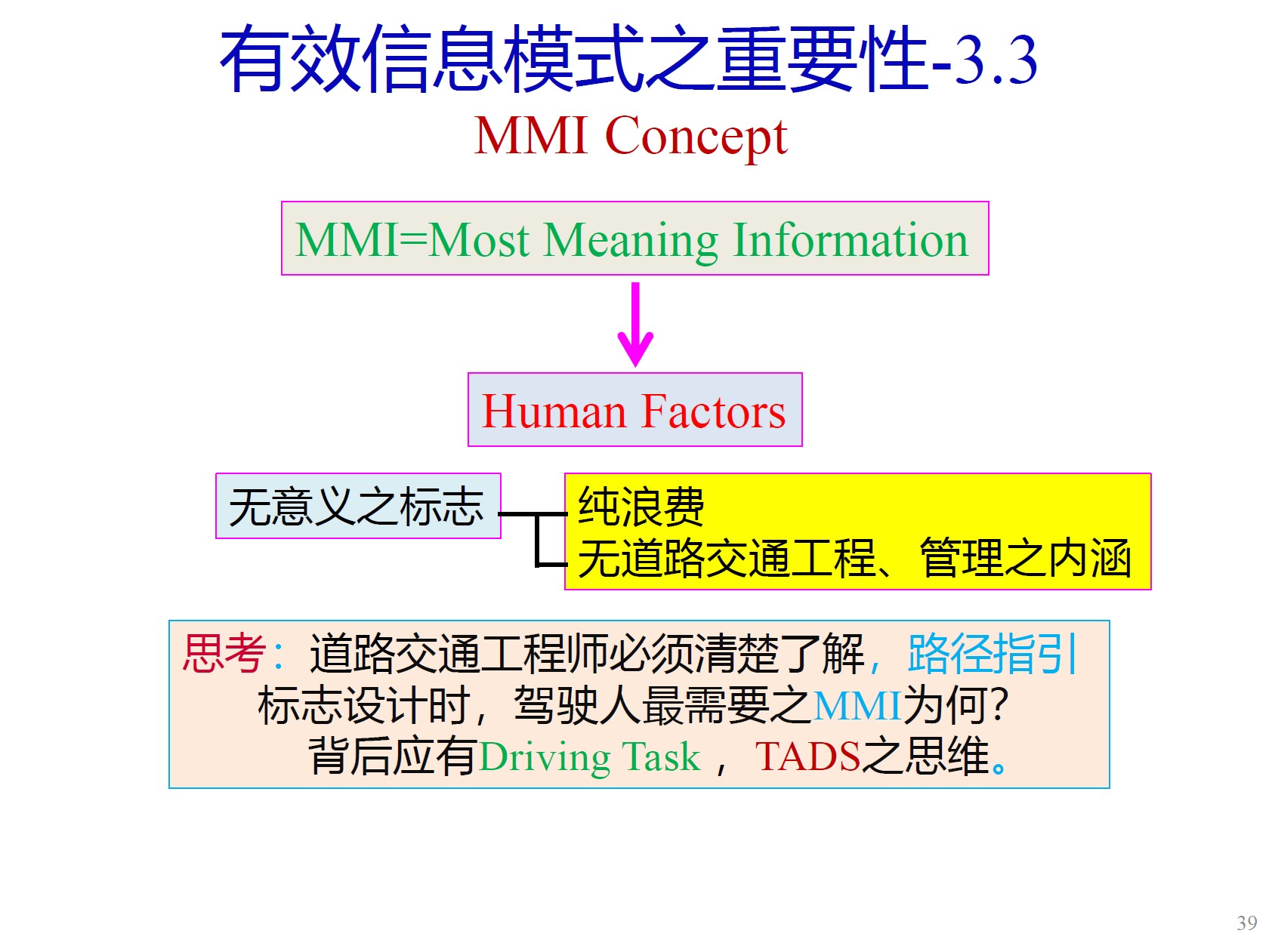
图12 人因与驾驶任务相结合
2.4 路径错觉
路径错觉(Driving Path Illusion),是指驾驶人受“视错觉”的影响而导致行驶路径与正常路径有所偏差,是驾驶人的“无心之过”。这种情况最大的后遗症便是车辆驶出车道路权之外,即入侵效应(Encroachment Effect),是车辆运行速度未能与道路几何线形合宜搭配的结果。故针对曲线段的入侵效应,衍生出建议速度(Advisory Speed)以及速区(Speed Zone)长度的概念,有针对性地搭配优质的“速度管理”(Speed Management),可进阶至“区域路网之速度管理即速差理论”,以此降低路径错觉对驾驶人的不良影响(图13)。
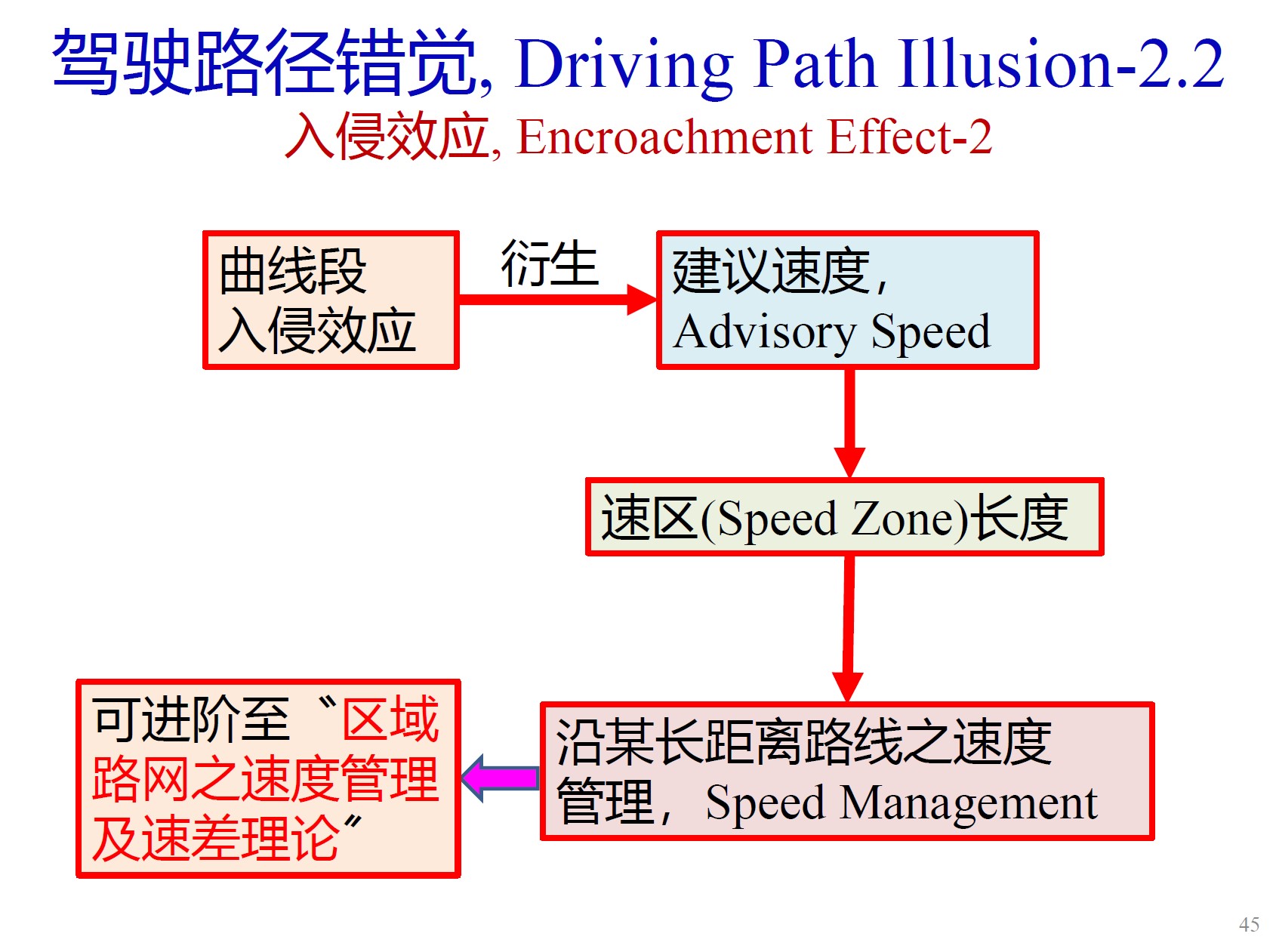
图13 驾驶路径错觉
2.5 直观半径
直观半径(Apparent Radius)指目视直接认知感受到的曲线半径,但在某些平、纵曲线几何线形组合下,直观半径可能与真实的曲线半径有实质误差。平曲线上若同时存在竖曲线,应仔细检核可能存在的视错觉现象,这是道路交通工程中需考虑的重要环节。实际研究中,多采取录像、现场勘验及事故验证等方面验证是否存在视错觉现象。(图14)
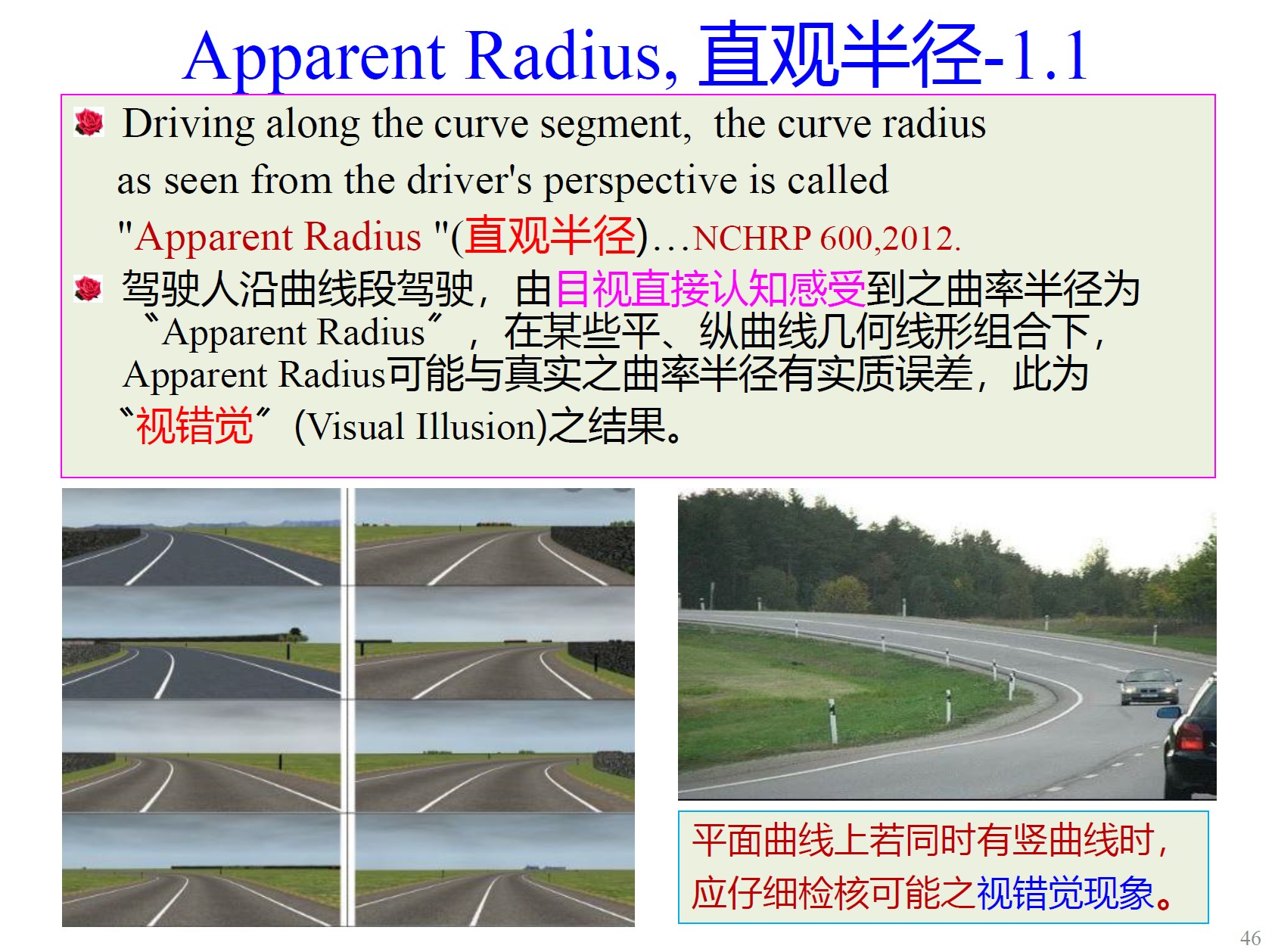
图14 直观半径
平曲线弯道路段存在下凹竖曲线时(图15(a)),驾驶人会产生视觉扭曲(Visual Distortion),这时驾驶人感受到的直观半径大于实际曲线半径,易导致车速过快,车辆跨越中央分向标线大轨迹行驶。而当平曲线弯道路段存在上凸竖曲线时(图15(b)),驾驶人感受到的直观半径小于实际曲线半径,会有视觉不连续之感,甚至会突然减速。这些情况均存在安全隐患。
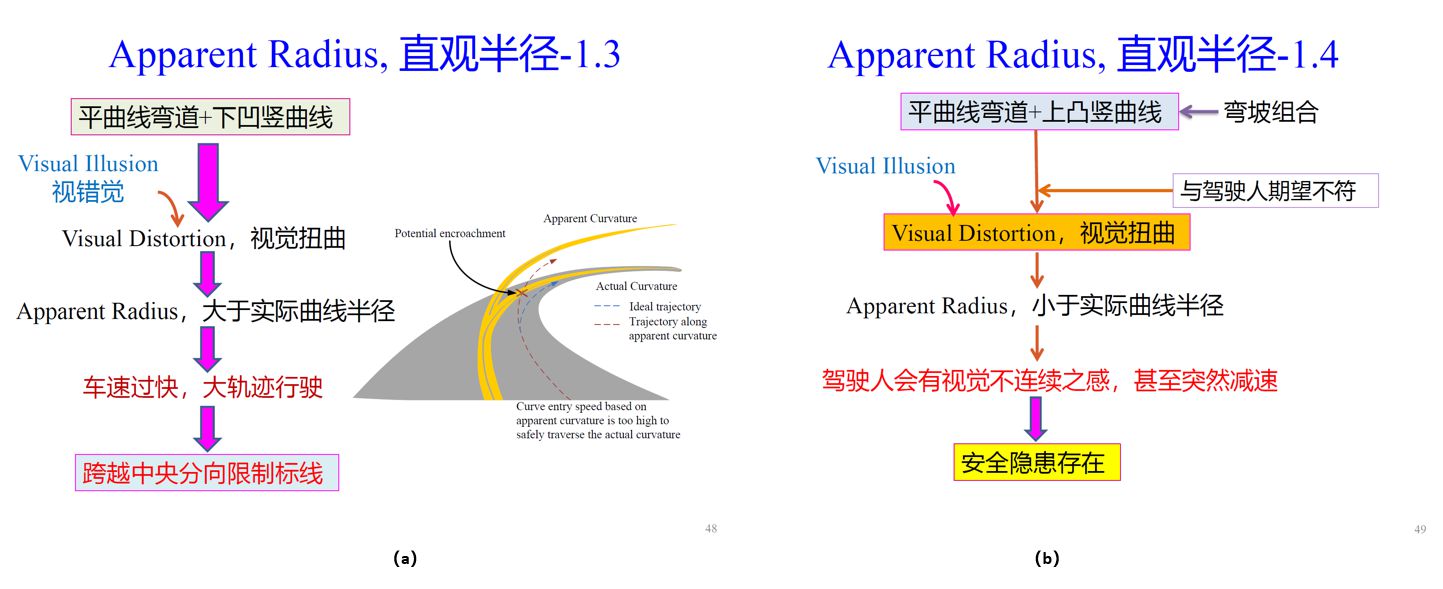
图15 下凹曲线与上凸曲线情景
2.6 曲线车道控制
速度可控、正确掌控方向盘是保证车辆在曲线段处车道内平稳行驶的主要因素。道路路线设计规范中需考虑到驾驶人“预期效应”与车辆在曲线段的反应,例如超高、曲线加宽等皆为需考虑的因素。同时也应注意到白天与夜晚的道路线形诱导的差异性,白天主要依靠标线,夜间为保证行车安全,当视觉需求不足时,可辅以适量具有反光功能的线形诱导设施(图16)。
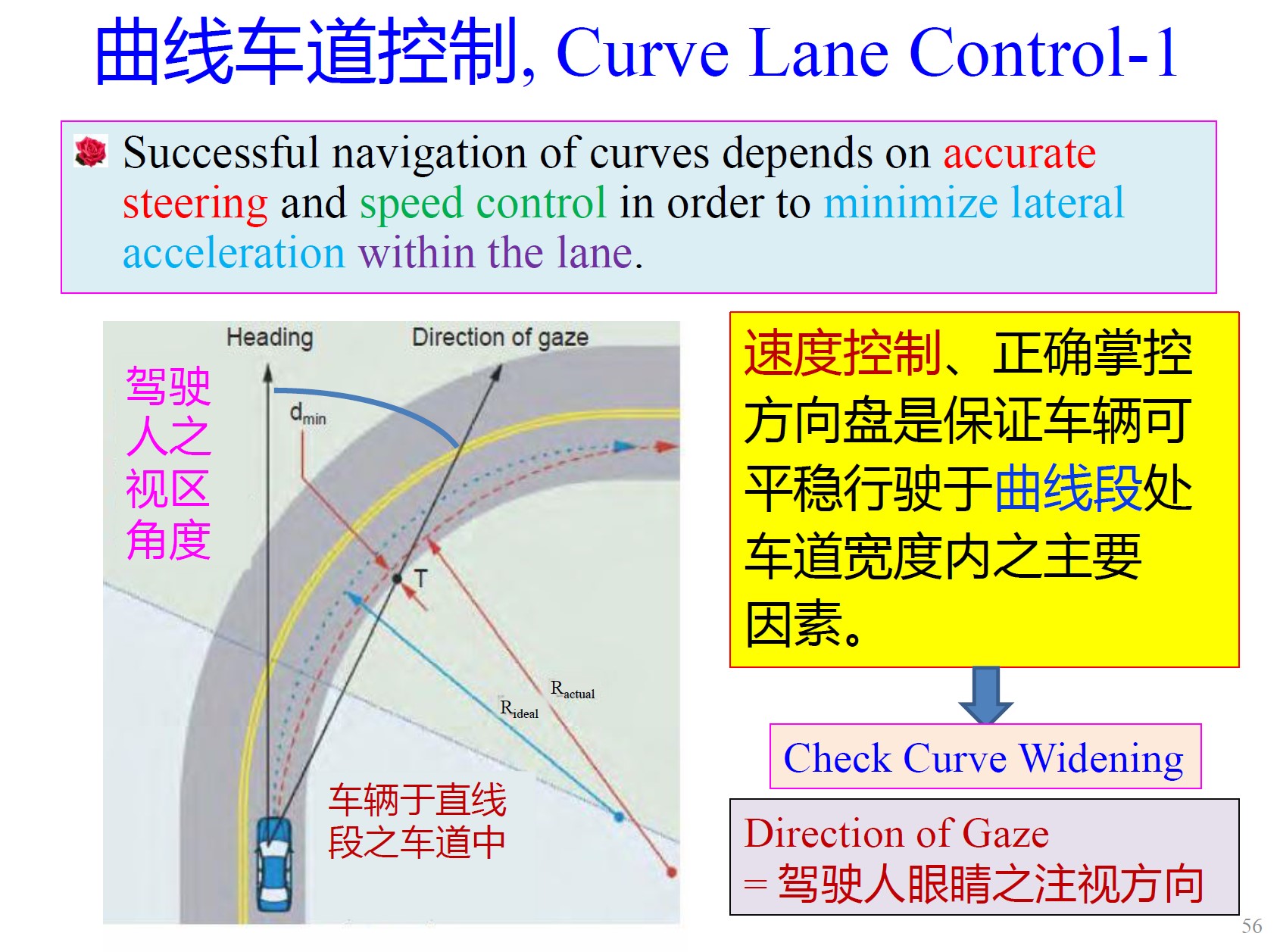
图16 曲线车道控制
2.7 视觉误导
徐老师展示了一些易造成视觉误导的案例。如图17(a),上下坡曲线路段,A车行进中看到B车似乎在自己车道上疾驶而来,紧急动作易导致事故。正常行驶的车辆看到前方的树木,以为道路是直线路段,但实际上路段是弯道。视距虽然可以,但存在视觉误导源(图17(b))。
同时,标志布设应遵循驾驶任务原理,应以先预告、再警戒、再行动的顺序设置,避免存在Sign dilemma(图17(c))。标线若不易视认,将增加驾驶人误判弯道曲率的机会,在过弯的准备阶段容易采取错误的速度,这种现象多发于缺乏驾驶经验的驾驶人群。故建议速度的设置十分重要,并且夜间的标线重要性远大于白天(图17(d))。
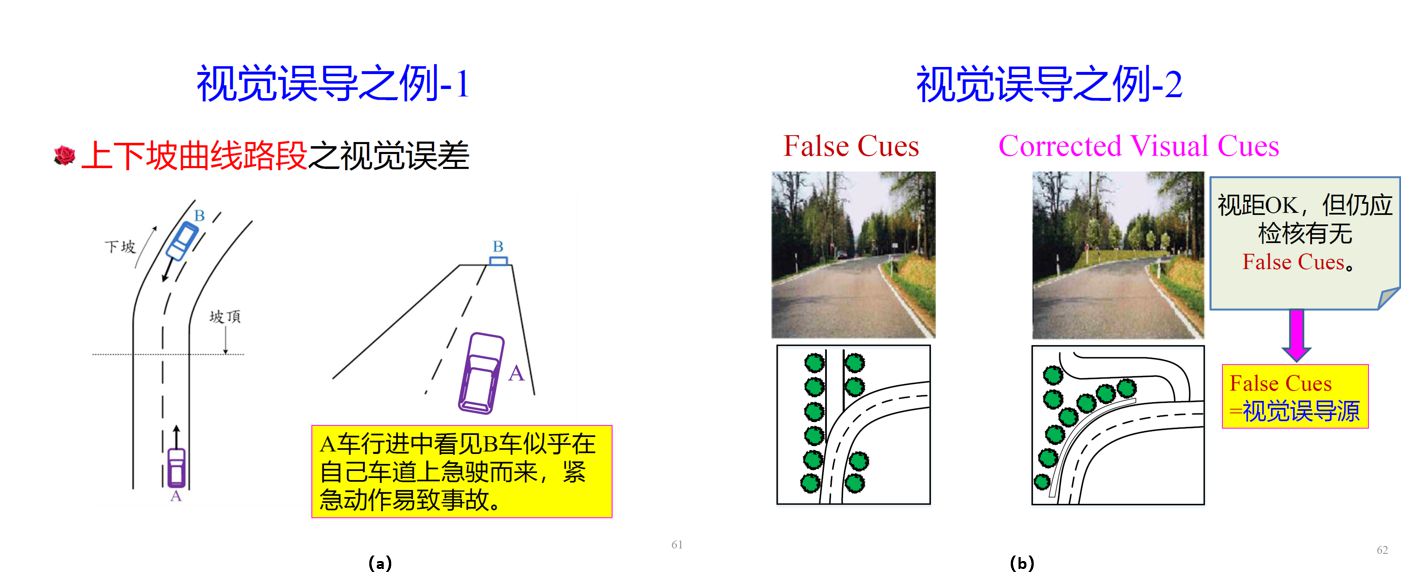
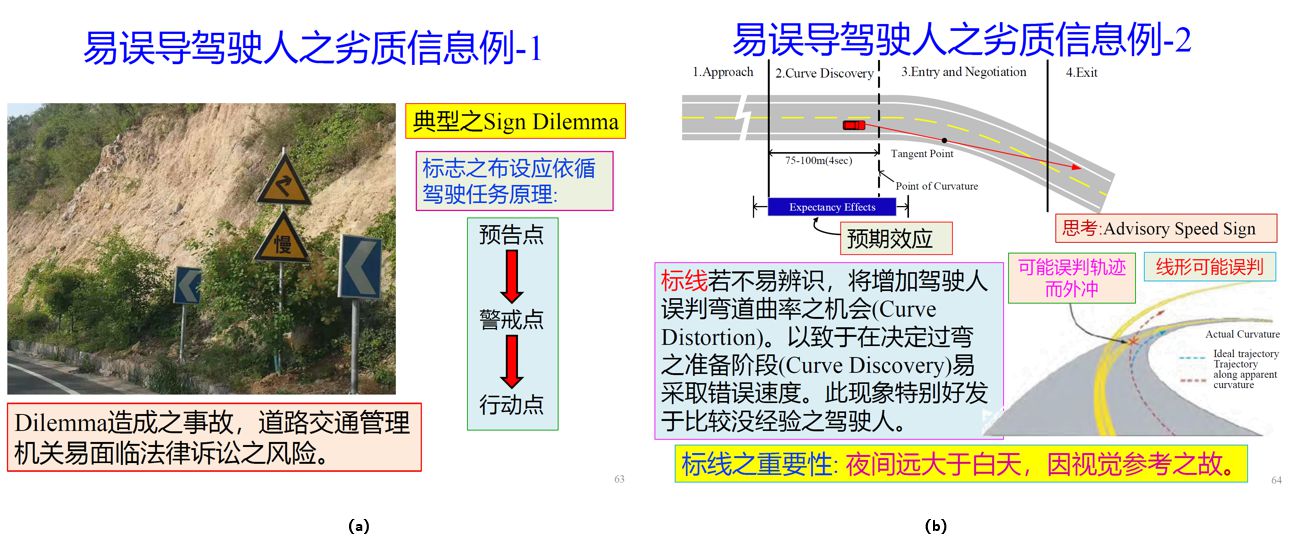
图17 曲线路段视觉误导的案例
3 速度选择(Speed Selection)
由于道路为长距离的构造,沿途驾驶环境不同,车速内涵广且变化性大,为保证交通安全,同时保障运输效率,需将车速控制在合理的范围之内。驾驶人凭借其对道路的直觉感知调控车速,但这种直觉感知可能与实际状况有落差(图18)。因此,应提出了速度管理的概念。速度选择是驾驶人根据道路、环境等多重内、外部因素,自主选定的,同时道路交通设计者应具备速度管理的思维。优质的速度管理对驾驶人进行驾驶任务具有极大的帮助。
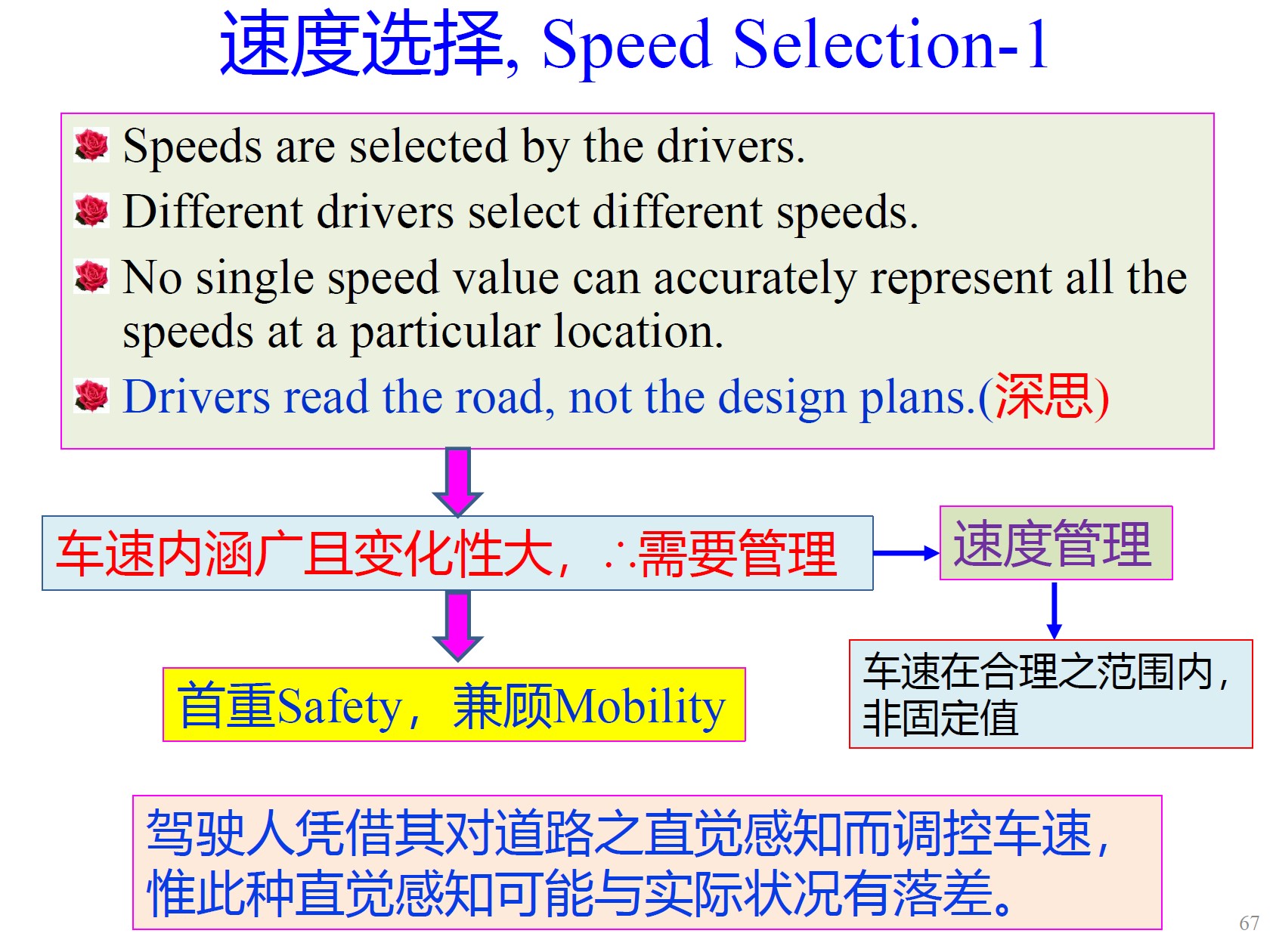
图18 曲线路段的速度选择
3.1 进弯速度
进弯速度为车辆进入曲线段起点时应具备的“合理速度范围中的某一速度值”。如图19所示,该值的起点不应位于BC点处,根据人因理论中的PRT和Short Memory,起点应该位于BC点前方4-5秒行程距离处,此处也为“限速标志”、“建议速度标志”的布设位置。进弯速度不同,则行车轨迹不同。因此也衍生出“行车轨迹”检核、标志设计、速度管理、视距及视区、曲线加宽等细节。
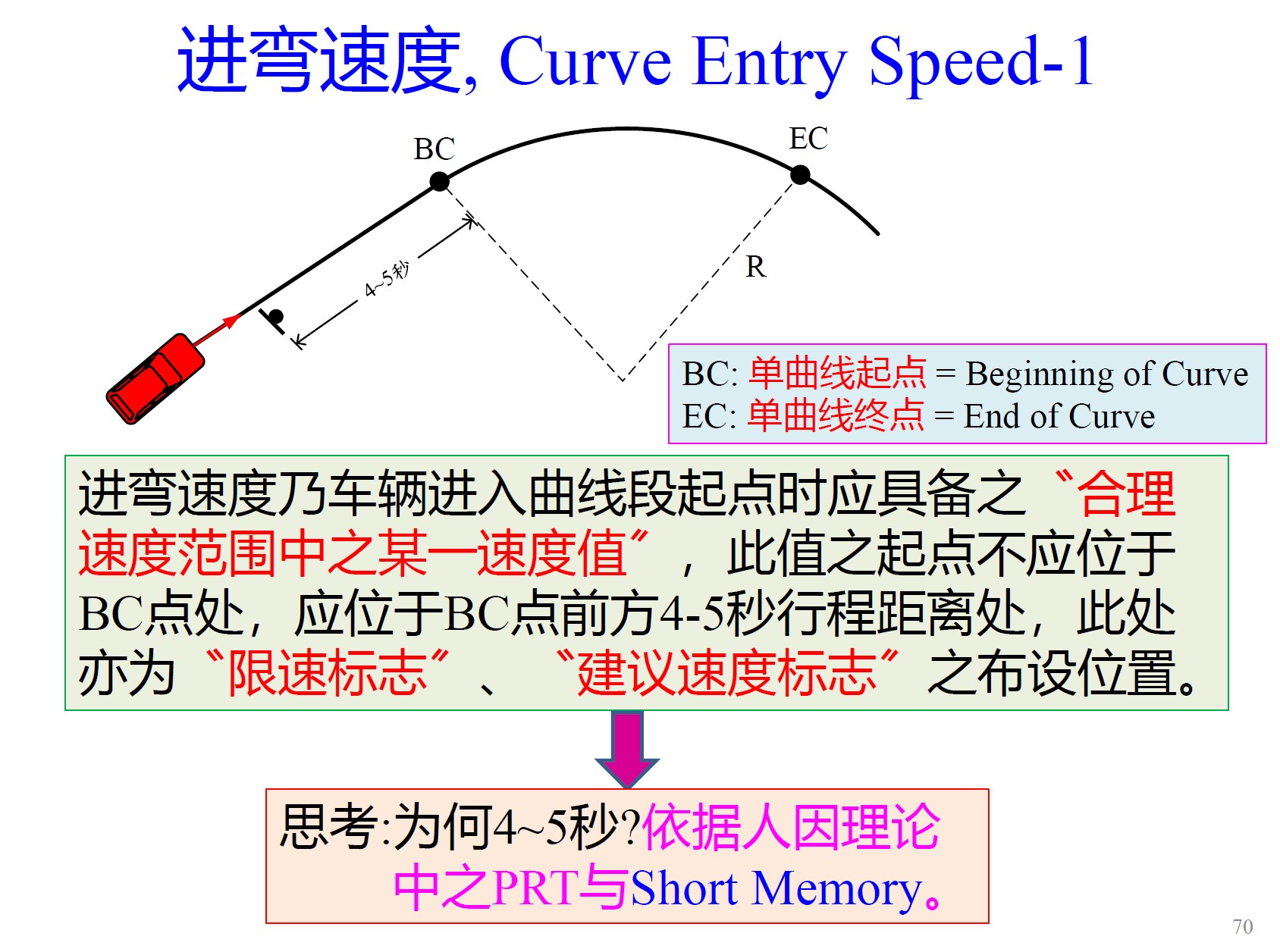
图19 进弯速度
由进弯速度还衍生出曲线段的超高(Superelevation)设计、横向排水处理及载重车辆重心核检、曲线段潮湿路面的摩擦力等细节。重心高的载重车辆,除非刻意提高路侧护栏的强度和高度,否则传统的TL3、4的路侧护栏无法阻挡Rollover Effect,但在实际工作中,全部使用高强度护栏不现实,进行速度管理才是长久之计(图20(a))。除此之外,由于上游端缺乏警告、建议速度的标志,若车辆的进弯速度过高易导致侧翻(图20(b))。
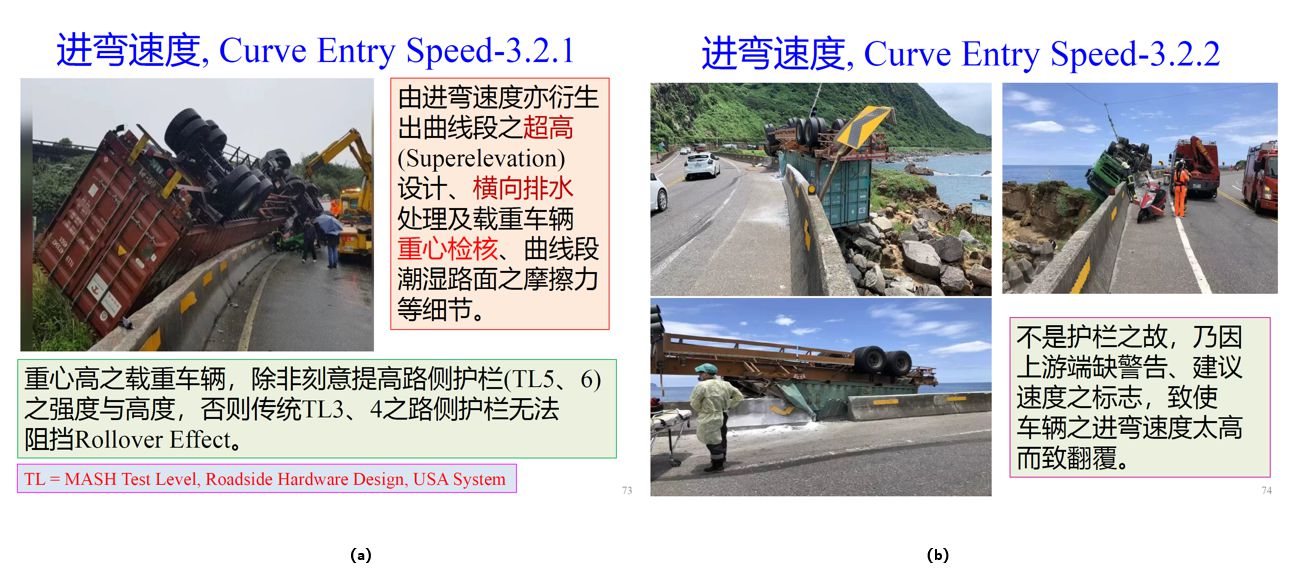
图20 进弯速度衍生的设计细节
4 视线遮挡(Slight Obstruction)
4.1 视线遮挡的重要定义
视觉需求占据驾驶任务的重要角色,视线遮挡是指驾驶人无法正常执行其驾驶任务,或理解为存在安全隐患。驾驶人的视区可细分为前视区和后视区(图21)。前视区为驾驶人目视前方可清晰明视的锥状区域(Slight Cone);后视区指驾驶人利用车辆各后视镜、监视设备,可明视的车辆旁侧及后方区域。道路交通工程设计考虑的视区仅限于“前视区”,后视区必须由驾驶人自主判别。且设计无法考虑驾驶人前视区被其他车辆遮挡的情况,属于驾驶任务中的Control,驾驶人必须自我控制,例如控制前后车间距。ITS车辆可以一定程度上克服前视区的难题。
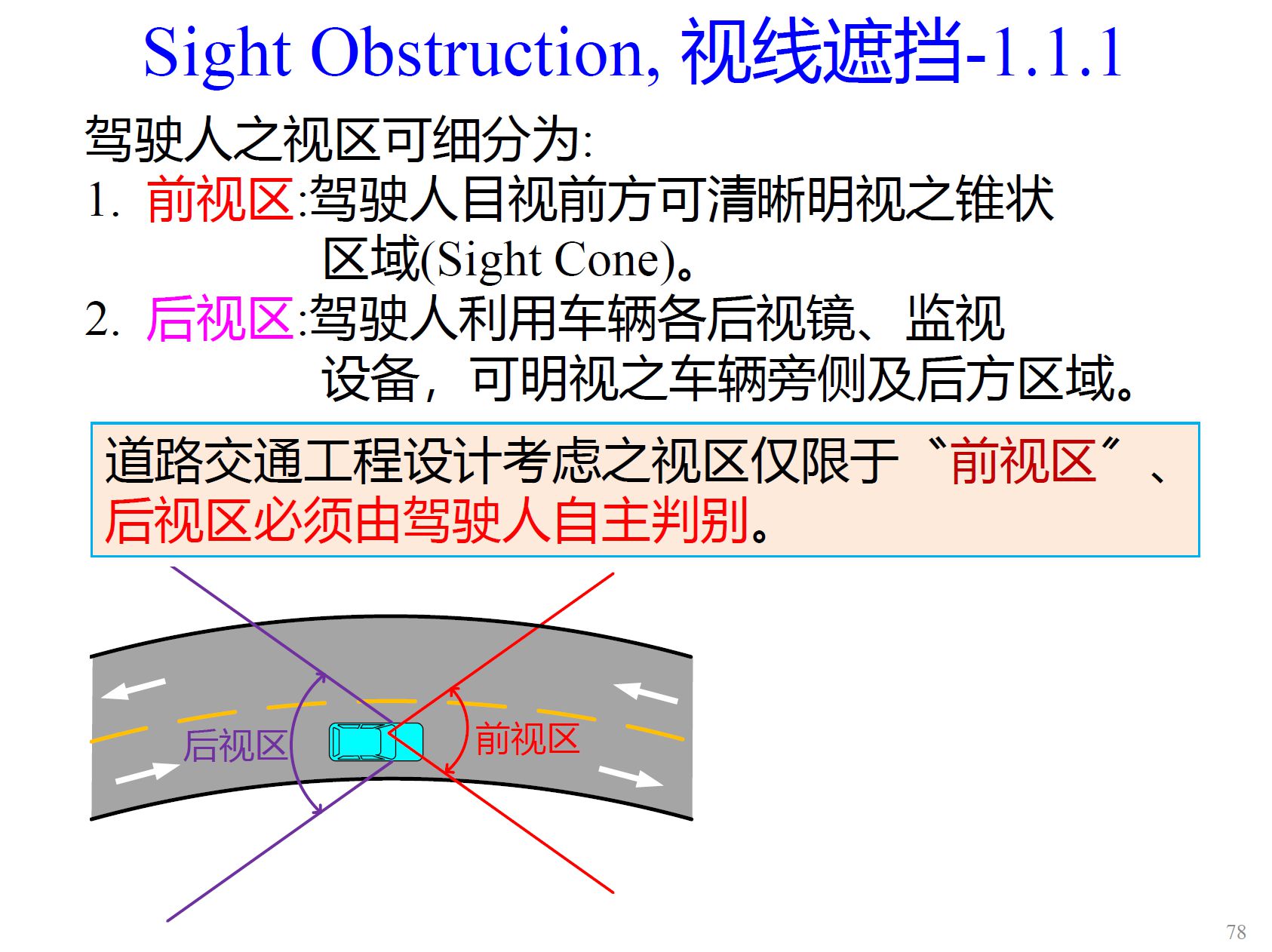
图21 驾驶人的视区分类
视距共分为七大类:停车视距(SSD)、应变视距(DSD)、会车视距(ISD)、超车视距(PSD)、交叉路口视距(ISSD)、平面弯道前视距(SLSD)、凸形竖曲线视距(PVSD),各有其适用性。任何道路,不论其交通功能位阶、几何线形,都应重视视距、视区,不可出现前视区被遮挡的情况,故应沿道路不同区段,检核应该满足的视距。
视线遮挡(Slight Obstruction)指驾驶人的视距、视区受阻碍的现象。例如图22(a),曲线中存在岔路口,且右侧存在绿化遮挡,存在安全隐患。故视线遮挡的检核应涵盖道路行车范围内的任一点,多车道曲线段应更加谨慎。曲线段旁存在视距遮挡时,还极易发生追尾事故,如图22(b)中,因此除检核视线遮挡外,还应该检核因“速差效应”(Speed Differential Effect)造成的连环事故。
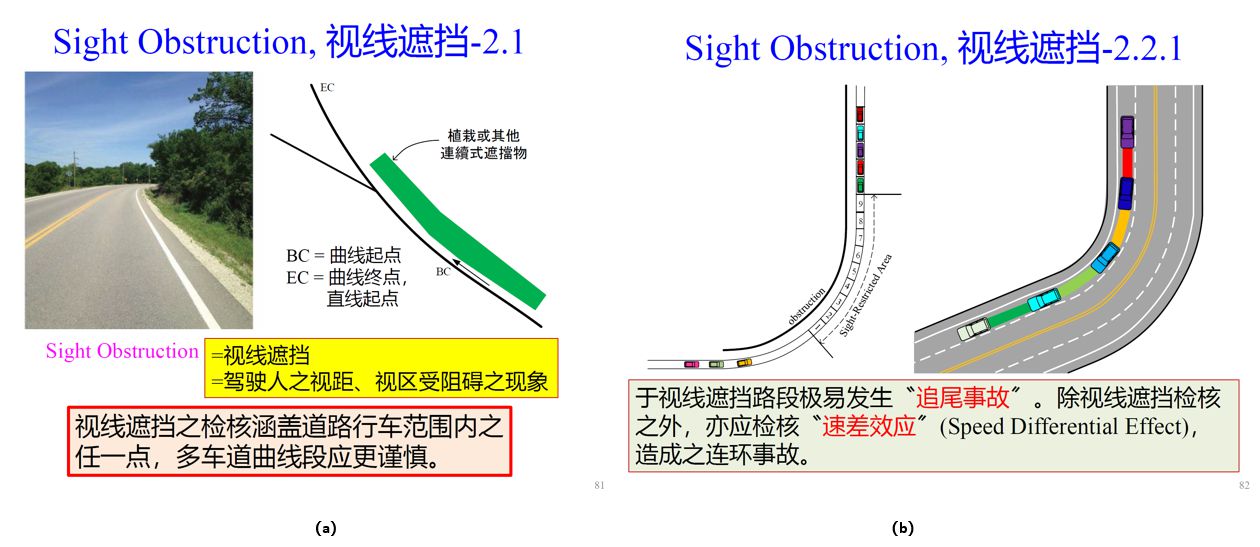
图22 曲线段视线遮挡
徐老师还介绍了曲线路段视线遮挡的案例。如图23(a)所示,曲线段内侧植栽与前方车辆均可能造成后方车辆的视线遮挡,故应固定修剪曲线路段内侧的绿化。如图23(b)所示,中央分向限制标线绘制应清晰,超车视距不足时,应绘制双黄实线,超车视距满足要求时,可绘制单黄虚线。徐老师还提到,双黄实线可以搭配渠化,调整两实线之间的距离,而单黄实线无渠化功能,无法调整实线的间距,并且单黄实线可能会导致两车均未越线,但车身侧击的情况,故单黄实线应该谨慎使用,如图23(c)、(d)所示。
道路交通工程与管理单位应结合RSA(Road Safety Audit)处理视线遮挡问题,结合白天和夜间的行车情况,适量清除植栽,布设合宜的驾驶任务辅助设施(图23(e)),道路完工之后,还须有完整的“禁建”、“限建”警告(图23(f))。
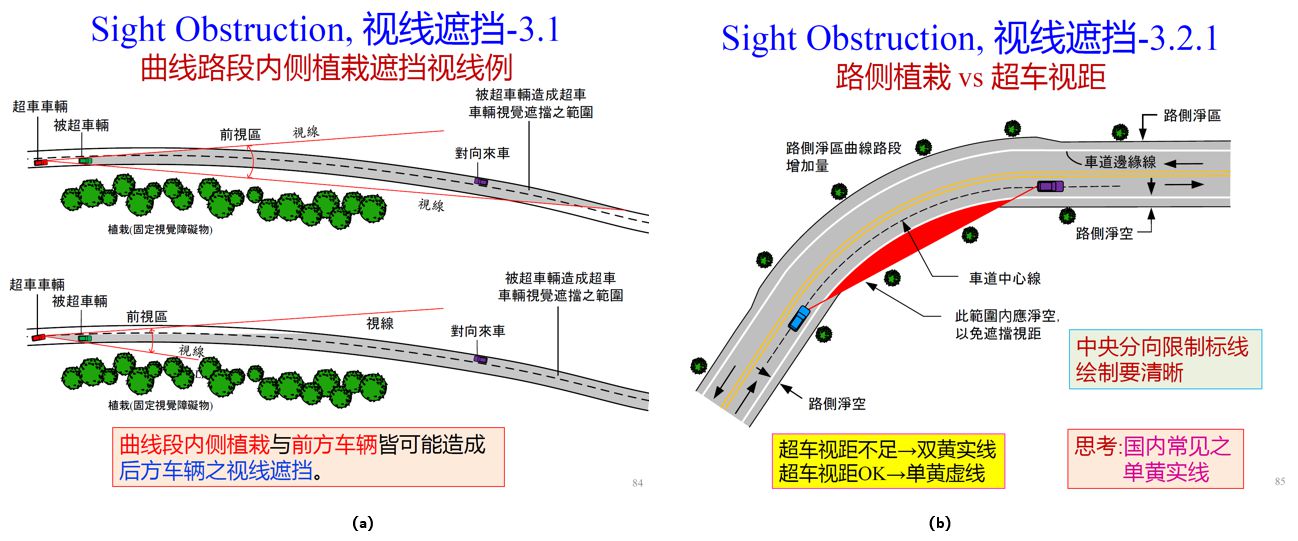

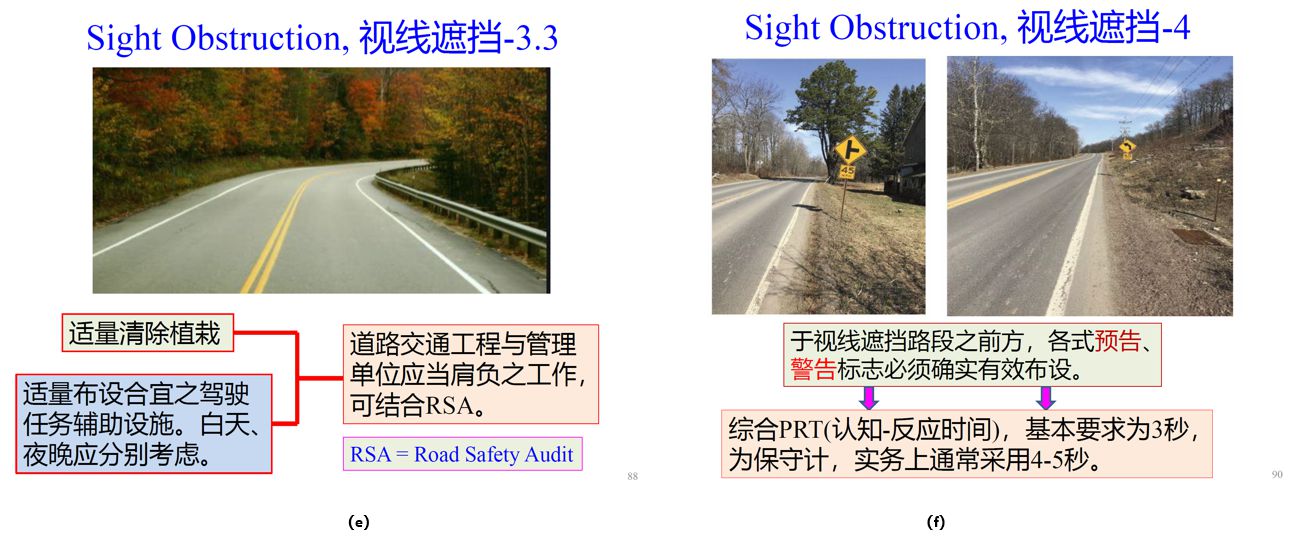
图23 曲线路段视线遮挡案例
4.2 平曲线段-车辆故障警示
驾驶人于车辆后方未正确摆设车辆故障警示,可能无法发挥其警示后方来车的效果。例如以下路段,即使驾驶人按照法规在车辆后方树立车辆故障警示,但如果没有考虑到道路几何线形,车辆故障警示也可能无法发挥警示作用。(图24、25)
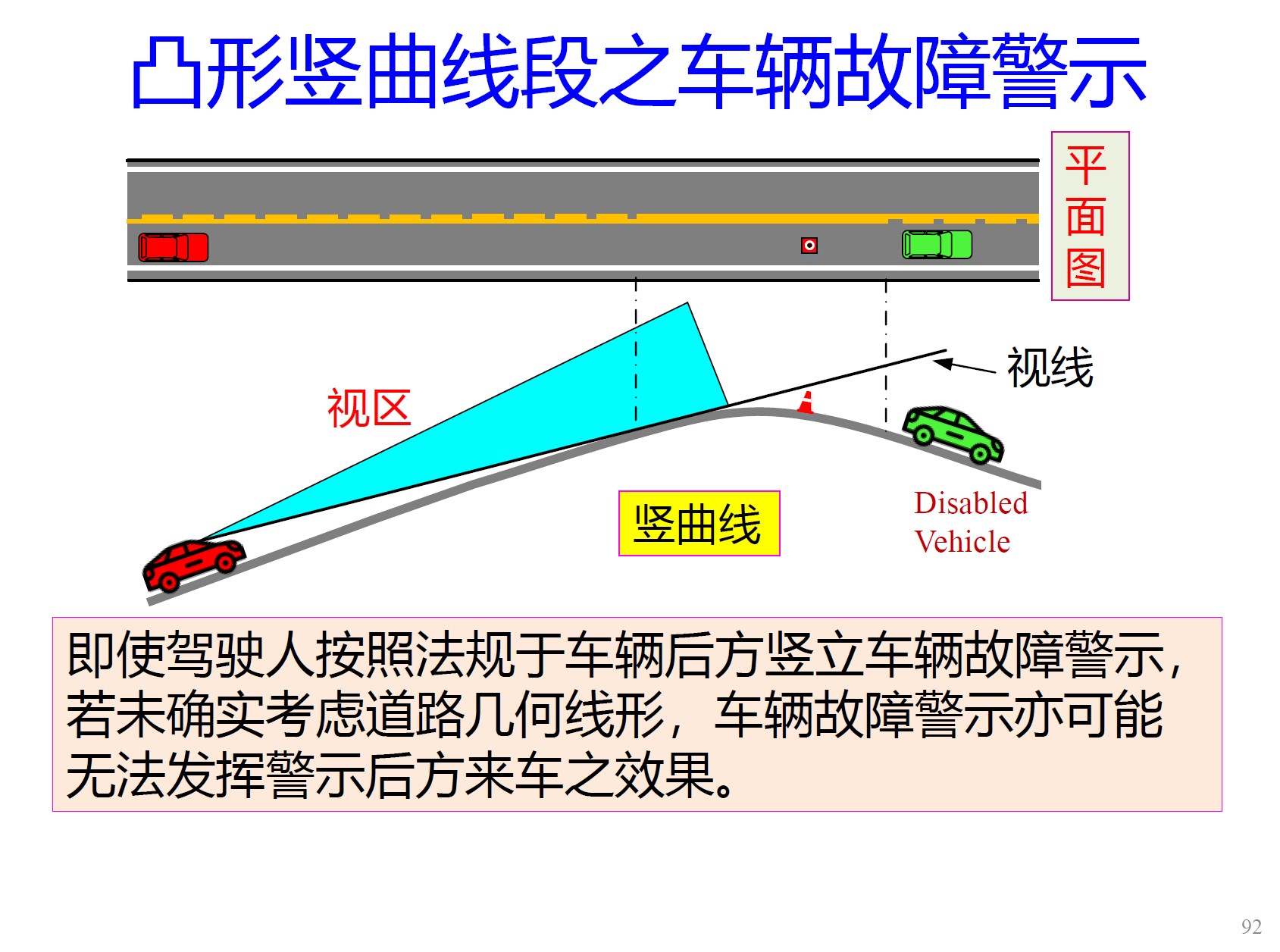
图24 凸形竖曲线的车辆故障警示
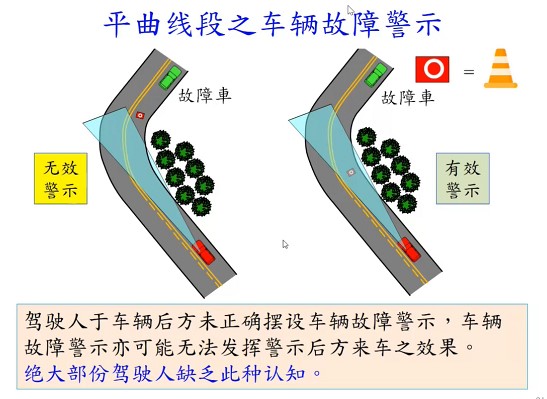
图25 平曲线段的车辆故障警示
5 直线段-曲线段-直线段驾驶情节任务分析
道路交通工程规划设计者应深入思考如何使驾驶人简易操控车辆。可根据自己的专业判别,自行决定驾驶区段(Driving Segment)的起始点。车辆驾驶是一个连续的过程,故驾驶区段必须始于BC点的上游端,且超过EC点的下游端,再进行TADS分析。(图26)
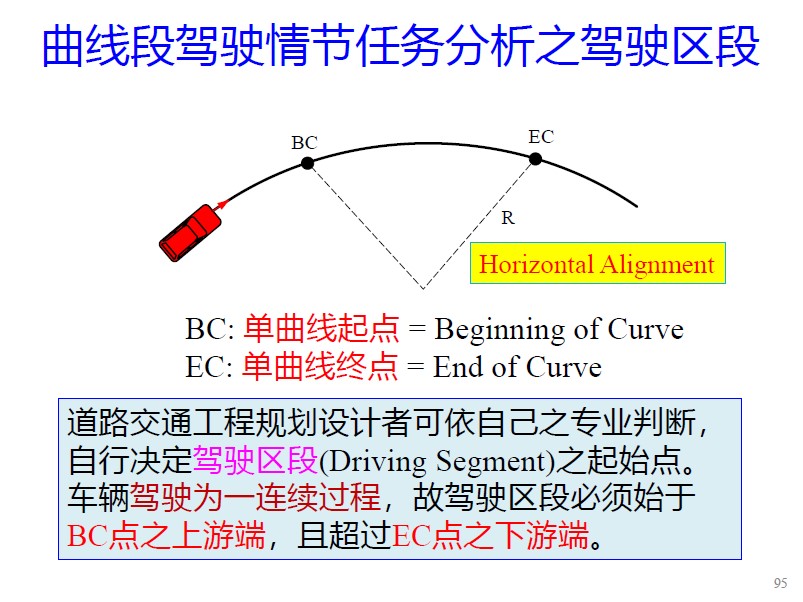
图26 曲线段驾驶情节任务分析-驾驶区段
NCHRP 600,2012中,由起点到终点分成四个驾驶区段,以开展整条路段的驾驶情节任务分析,所以该路段可以考虑4个Segment。其中,需要注意道路线形改变时(直线进入曲线路段),驾驶任务随之改变,因此交通工程的设计理念与细节也不同。
由图27也引出了四大独立驾驶区段。独立驾驶区段,指的是道路交通工程师为了进行详实的驾驶情节任务分析而切割的独立区段。不同的规划设计者可能会有不同的分段,但终极目标相同,都是为了帮助驾驶人在此总路段长度内(O-D)可以安全、平稳操控车辆,完成连续驾驶过程。四大独立驾驶区段组成一个连续的驾驶过程,分为接近段(Approach Segment)、曲线发现段(Curve Discovery Segment)、进入与调和段(Entry and Negotiation Segment)、离开曲线段(Exit)。

图27 四大独立驾驶区段
5.1 接近段
直线路段结束前,必须通过几何线形、建议速度、限速标志等让驾驶人知晓前方有曲线段,如此方可于驾驶人心中形成Expectancy Effect(预期效应)(图28)。对于驾驶人而言,目前所在的位置皆是眼前下游端的接近段,故接近段只是为了进行详实的驾驶情节任务分析而截取的某长度段,道路交通规划设计者可以依据专业决定其所取的长度。
车辆行驶过程中,车道线形改变,代表方向盘也必须跟随线形而转动(Steering)。驾驶人在由直线段进入曲线段的视觉需求必远大于直线段,故道路几何线形必须让驾驶人一眼便知前方为曲线段,且可清楚判定曲度值的大小,以调整转动其方向盘。也就是说,驾驶人眼前视距、视区范围内的道路三度空间状态及其他交通相关设施对驾驶人而言,有着“预示”的正面作用。
路段线形变化必须符合驾驶人的“期望”,尤其是明晰的曲线半径,可以帮助驾驶人做正确的“速度选择”。车道宽、直观曲线半径都是驾驶人的直接视觉参照物(Direct Visual Reference Cues),对速度选择有直接影响。在接近段中点、曲线发现段起点处布设前方曲线相关信息标志,符合驾驶人的预期效应。驾驶人的“预期效应”与“建议速度标志”是速度选择的两大主体,建议速度是速度管理的主要工作之一。“曲度认知”有误,则速度选择可能有偏差,形成安全隐患。故进行长距离速度管理之前,应事先检核驾驶人的直观半径与实际道路线形是否有落差。
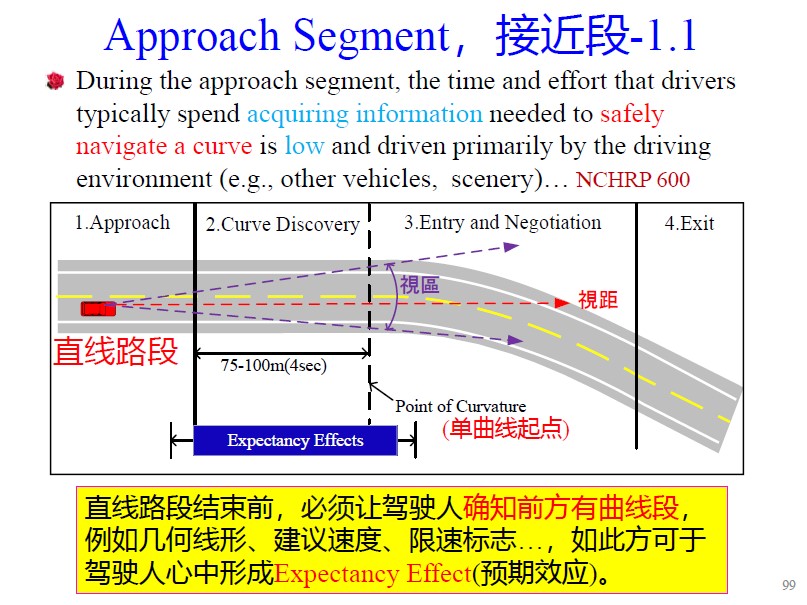
图28 四大独立驾驶区段之接近段
5.2 曲线发现段
曲线发现段(Curve Discovery Segment)必须让驾驶人确认前方曲线路段的曲率状况,以便合宜的掌握驾驶动作。在此阶段,视距、视区都扮演着极为重要的角色(图29)。“曲度认知”对于曲线驾驶的影响非常大,尤其针对驾驶经验较少的人,应特别注意直观半径。在“曲线发现段”,不宜用文字叙述式标志,应利用可长距离、一目了然的箭头(Chevron)指示,及具夜间反光功能的标志。
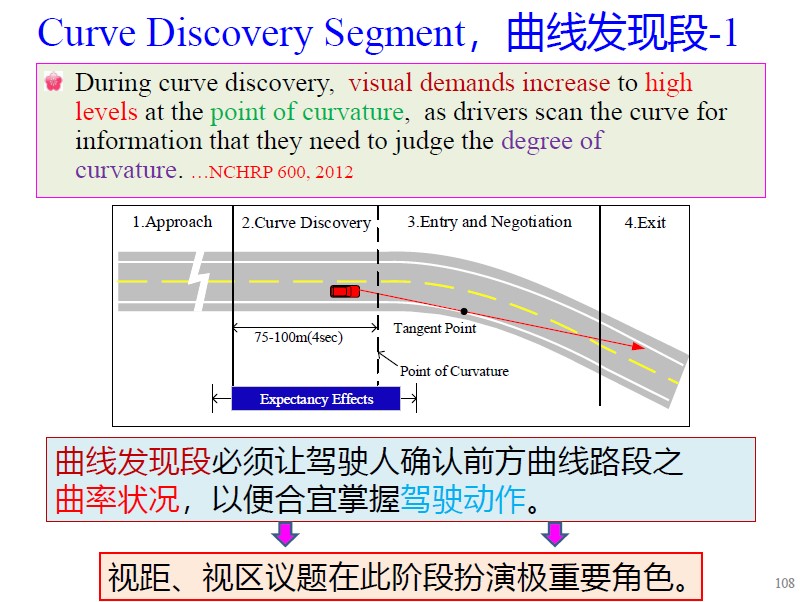
图29 四大独立驾驶区段之曲线发现段
5.3 进入与调和段
(1)有效信息模式
进入与调和区段(Entry and Negotiation Segment)的视觉需求程度最高。在曲线路段,路面标线、突起路标(Road Studs具夜间反光功能)皆是对驾驶人极有帮助的有效信息(图30(a))。寒带地区,道路边界(路权边界之外)易被大雪覆盖,故应布设“行驶道路边界线”的辅助长杆,此时的重点不在“路权边界”,而在于可辅助安全驾驶的道路边界(图30(b))。

图30 进入与调和段-有效信息模式
(2)速度选择
由于人是具有主观意识的,有速度相关信息的标志虽然可以帮助驾驶人,但可能并不是驾驶人“速度选择”的主要参考因素,还应该充分考虑Human Factor。车辆行驶在曲线段的横向加速度值与方向盘掌握是驾驶人调整车速的主要参考依据。驾驶人预期与针对曲线段的视觉信息认知才是驾驶人“速度选择”的主要根据(图31)。
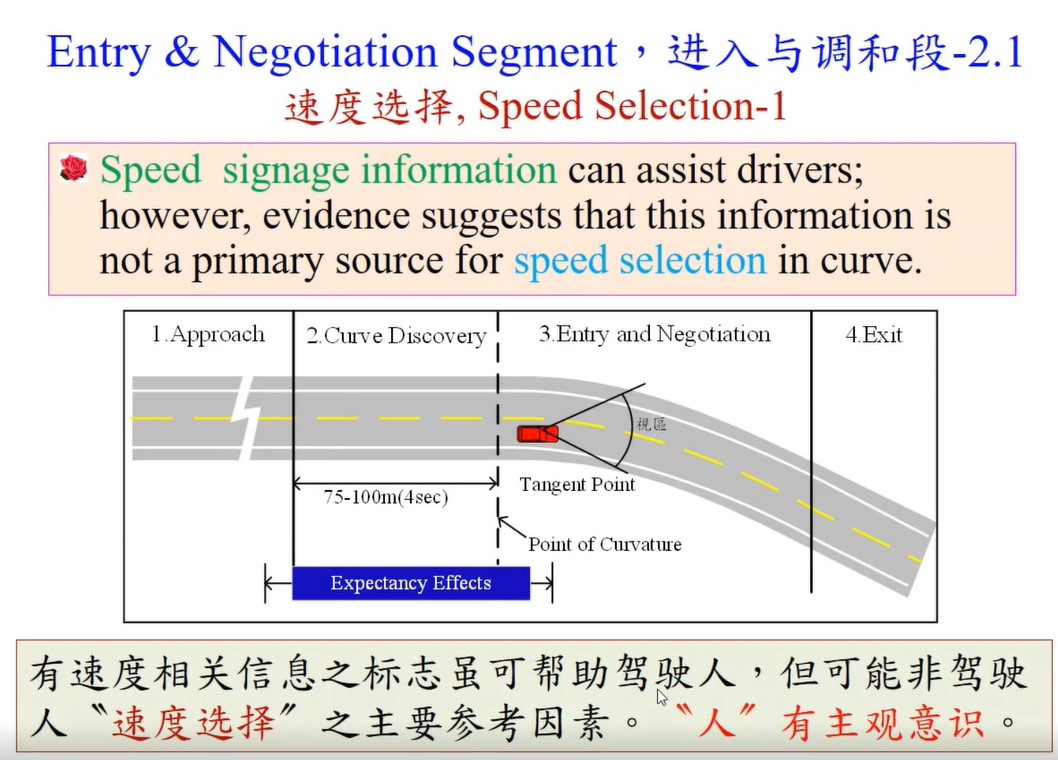
图31 速度选择
(3)标线
标线白天主要的作用是车道线形指引,这与驾驶任务中的指引(Guidance)有关,夜间有助于Preview Sight Distance的判定,与驾驶任务的Control有关(图32)。曲线段的道路标线是驾驶人夜间最有帮助的视觉参照物(Visual Reference Cues)。白天和夜间视觉参照物应分开考虑,夜间时段的视觉参照物远少于日间,故对于设施的布设,道路交通工程设计者需要深思,尤其应注意“文字式标志”的谨慎使用。

图32 进入与调和段-标线设计
(4)车辆控制需求
曲线段范围内,确保车辆能在车道内平稳行驶,是车辆控制的最重要需求。曲线半径越小,车道宽度越小,则车辆控制(方向盘掌握)难度越高。所以曲线段须检核是否需要进行车道加宽。图33根据交通功能位阶列出了车道加宽的可能路段。例如丘陵区、山岭区的狭窄路段,由于几何条件较差,曲线路段加宽的可能性高。
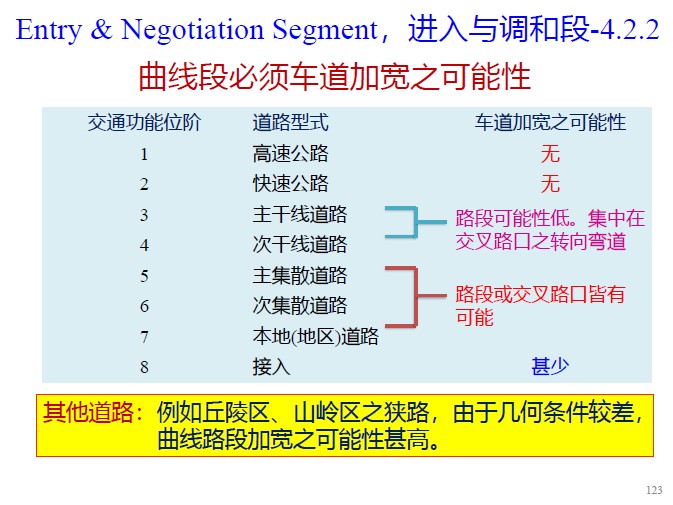
图33 曲线段车道加宽的可能性
5.4 离开曲线段
离开曲线段(Exit),指车辆离开曲线终点之后,进入直线段,恢复直线段后的驾驶任务,同时也是另一驾驶情节任务分析的开始(图34)。
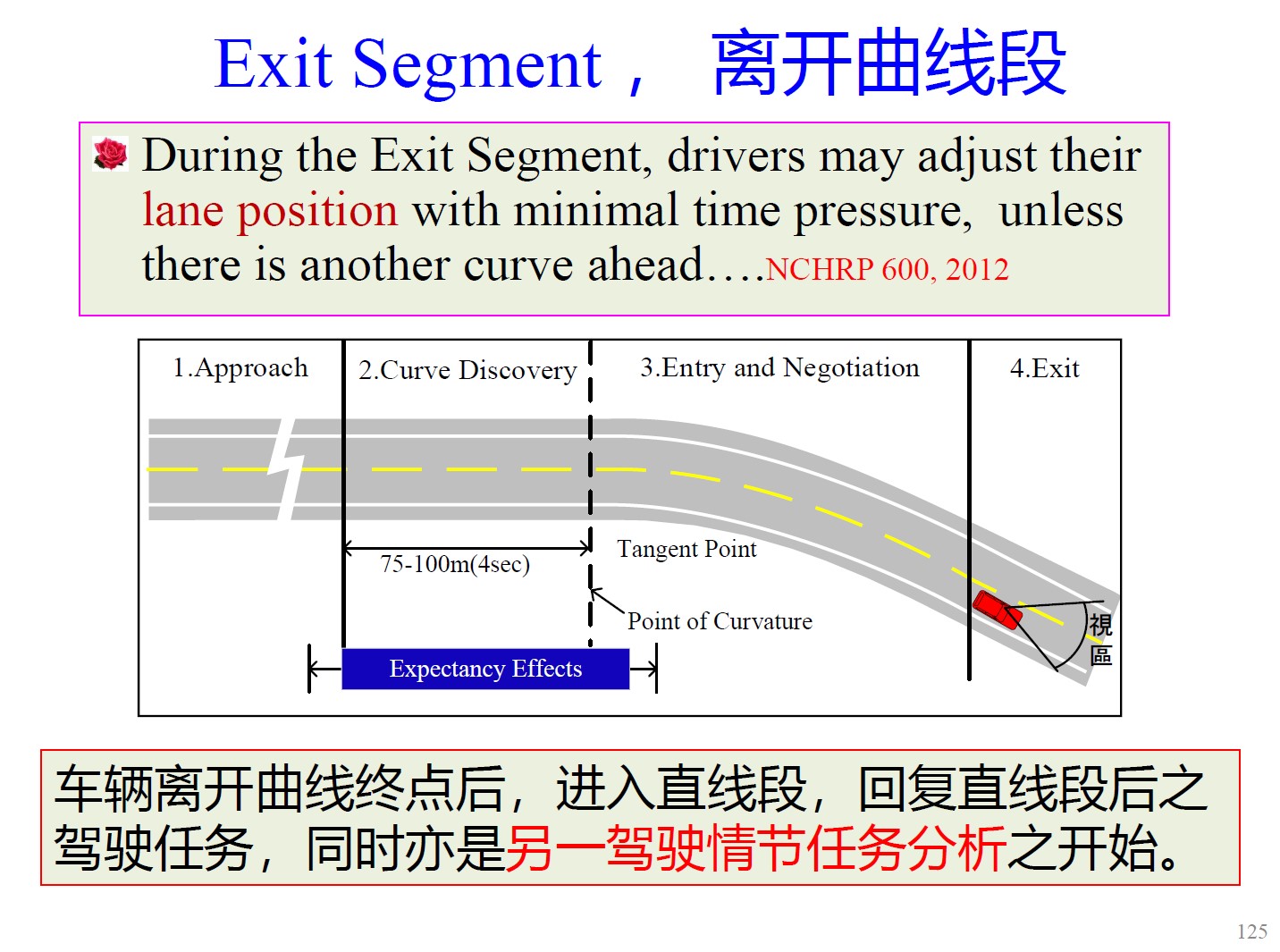
图34 四大独立驾驶区段之离开曲线段
5.5 由TACD思考设计细节
(1)曲率
曲率大小对驾驶行为的影响很大,会造成驾驶负荷(Driver Work Load,DWL)和入侵效应(Encroachment Effect),车辆容易离开通行路权边界(图35)。AASHTO中提出,设计规范中的“极限值”、“容许最小值”应尽量少用、谨慎使用,需要进行系统性的思考,减少驾驶人的速度控制失误。
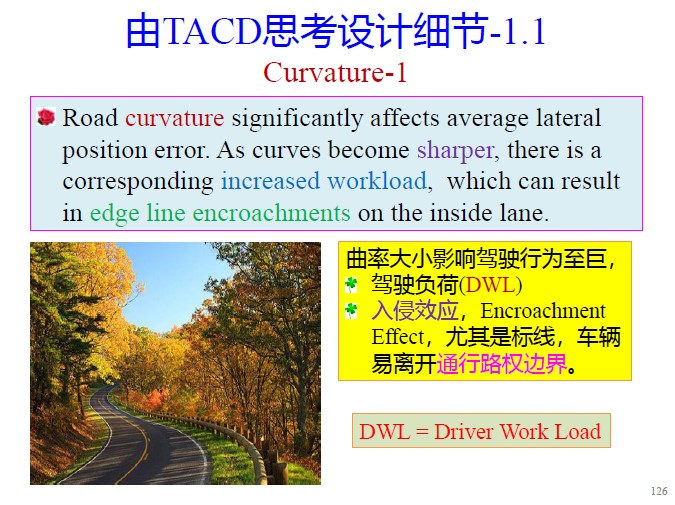
图35 曲率大小影响
(2)缓和曲线
对设计速度高的道路,缓和曲线的布设对驾驶人的车辆操控、道路景观、舒适性等均有正面的帮助。缓和曲线的布设方式最常用的是克罗索曲线(Clothoid Curve),其符合车辆行驶轨迹线和视觉原理,不易产生视觉扭曲(Visual Distortion),且离心加速变化率小。值得注意的是,缓和曲线如果太长,就会产生视错觉现象,容易误导驾驶人对曲线视觉的认知,造成速度选择失误,驾驶人对方向盘掌控较为困难。缓和曲线的长度,依据曲线半径而异,最合理的缓和曲线长度约为2-3秒的行驶距离。AASHTO中缓和曲线的计算公式如下图36所示。
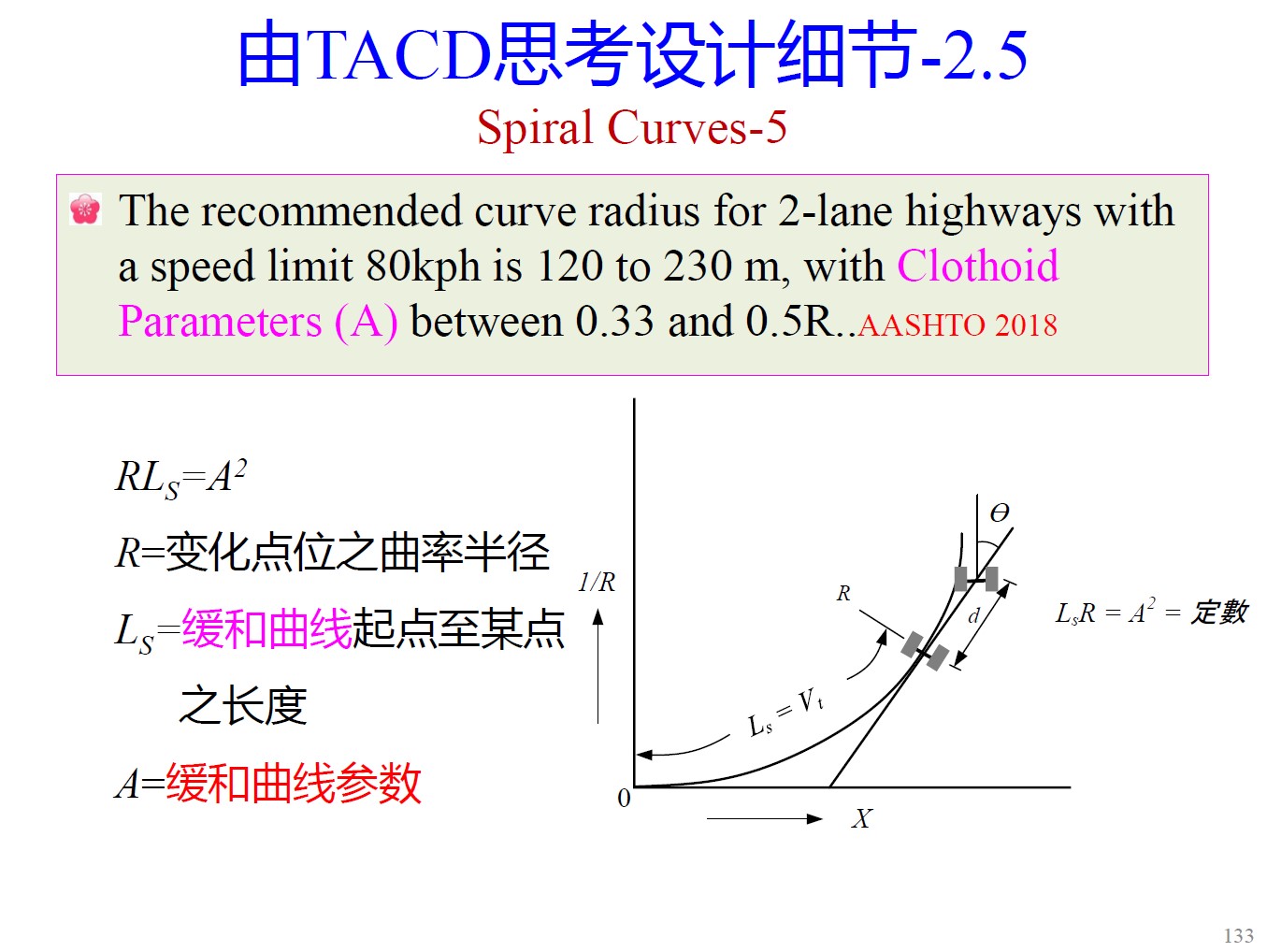
图36 缓和曲线的计算
(3)反向曲线(Reverse Curve)
设计速度低的道路才容许有反向曲线的存在。依据设计速度,同向曲线的长度必在某一规范值以上,如果两同向曲线首尾端距离过短,会导致驾驶人在短时间内面临繁复的驾驶负荷,即DWL太大,两反向曲线之间的直线长度也是如此(图35)。
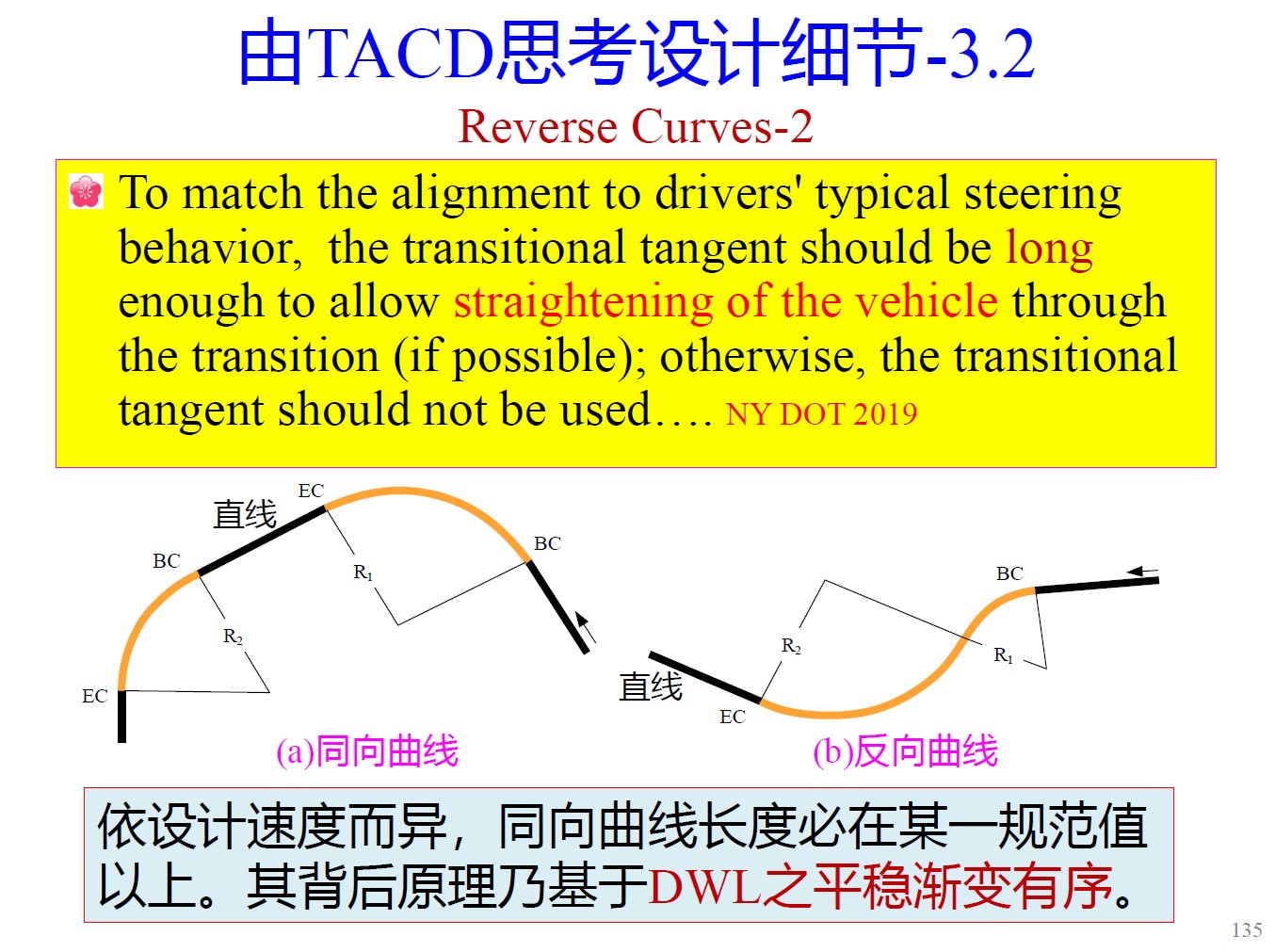
图37 反向曲线的设计
(4)设计一致性(Design Consistency)
如图38所示,A车的车辆小于临界速度,前轮轨迹与后轮轨迹无交叉,而B车的车速大于临界车速,前后车轮的轨迹存在交错。因此当道路条件符合驾驶人期望时,驾驶人有自主选择运行速度与合宜操控方向盘的本能。故曲线段的超高、车道宽、曲率与设计速度相适应时,可以降低驾驶人的驾驶工作负荷,即降低操控方向盘的困难。
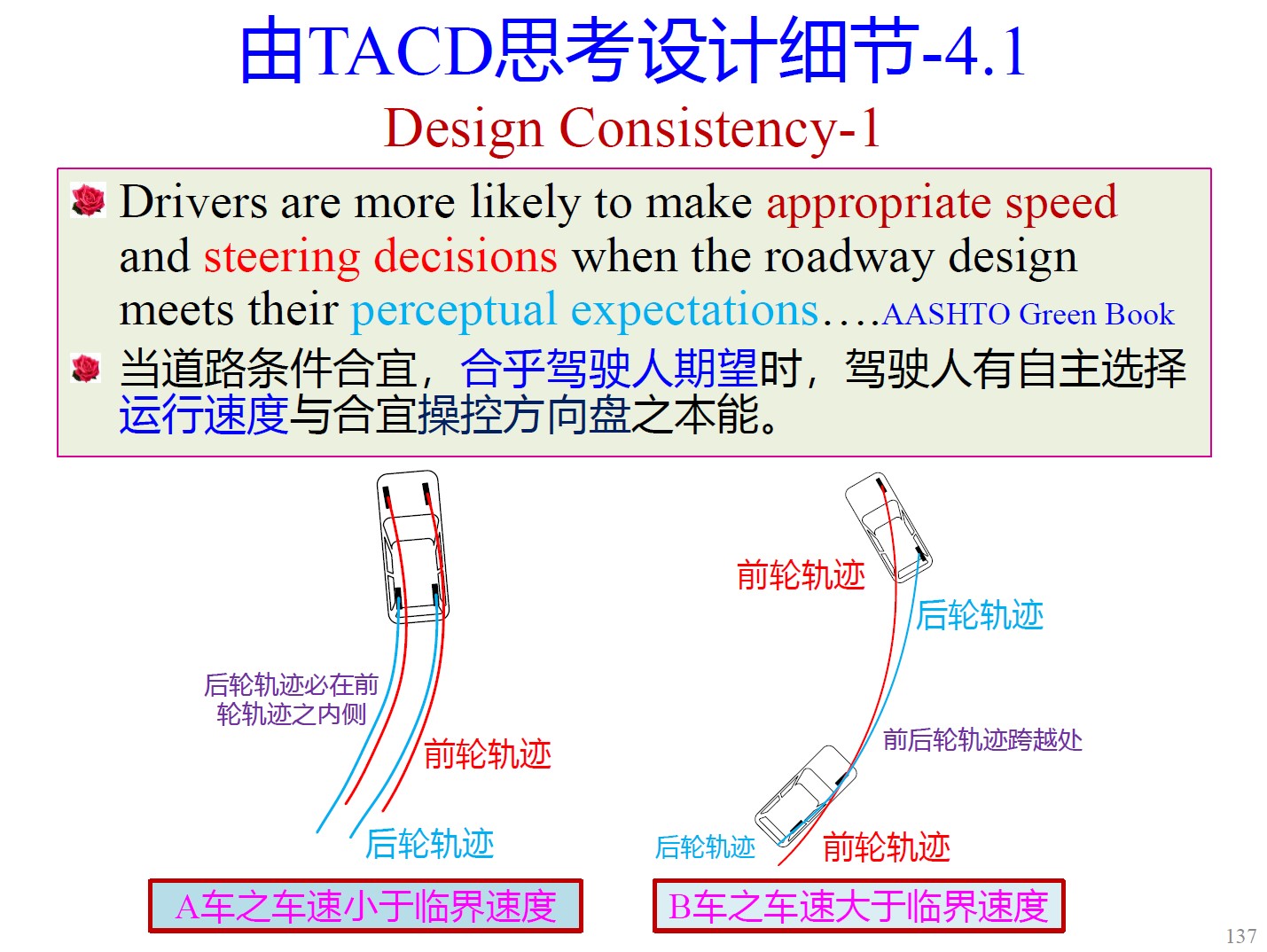
图38 曲线路段设计一致性
6 连续数个弯道的驾驶情节任务分析
6.1 连续曲线段驾驶任务分析区段
NCHRP中提出,连续数个弯道,须将个别弯道独立考虑,并做有效的连续检核。在面对数个连续弯道的道路线形,怎么进行驾驶区段的切割呢?徐老师提到,针对这个问题,没有绝对的标准,只要能确实达到精细化的驾驶任务情节分析(TADS)即可。
针对连续曲线段的驾驶任务分析,必须以三度空间(平面线形、纵断线形、道路横断面及路侧)的视觉充分检核各细项,例如视距及视区的连续性、合成坡度(排水坡度)、路侧安全防护设施、交通控制设施是否完备等(图39)。驾驶任务分析除了考虑道路本身的几何线形外,还应搭配驾驶人的视距、视区条件。同时也应考虑天气变异的情况。
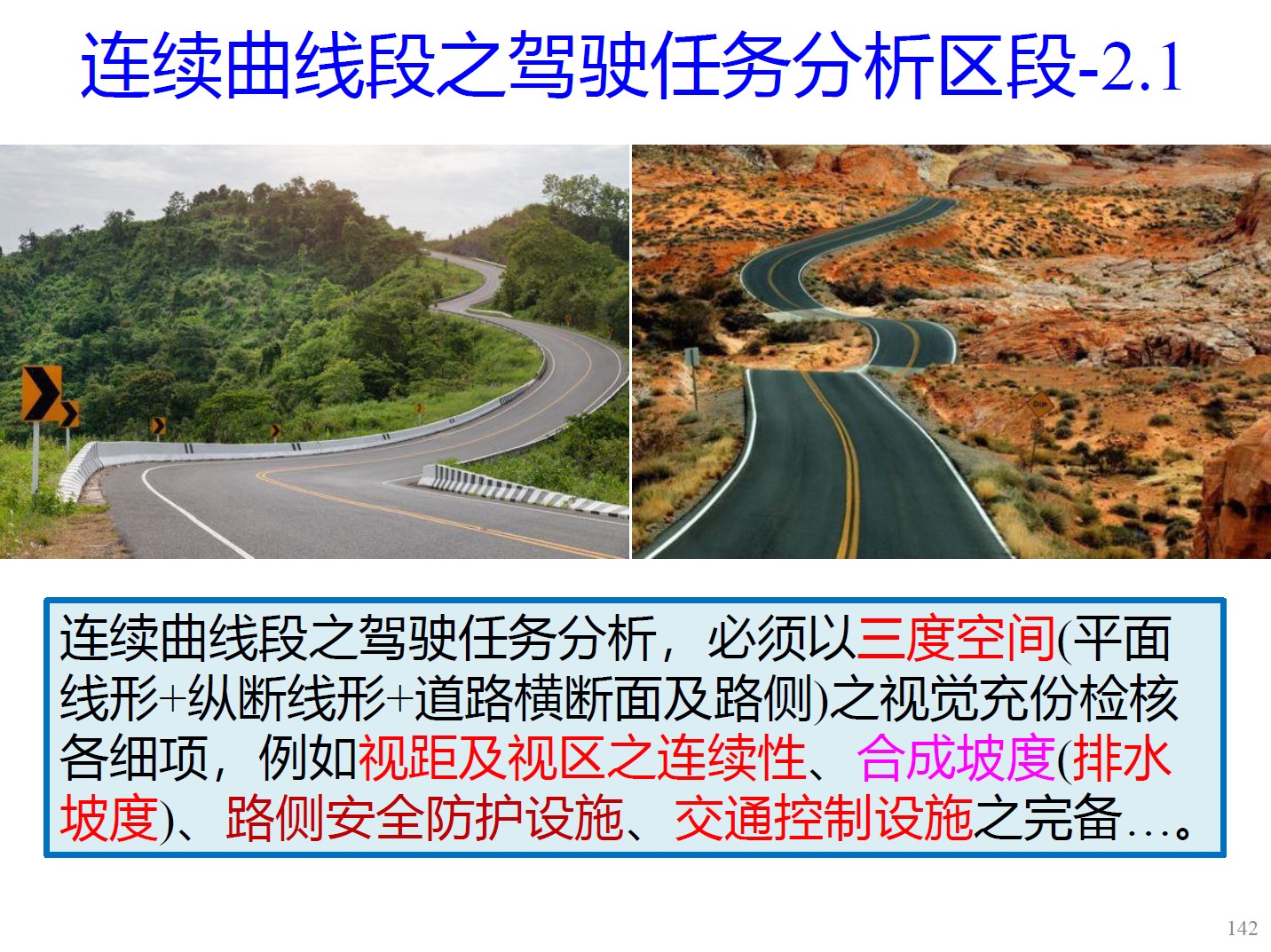
图39 连续曲线段的驾驶任务分析
连续曲线段的设计速度是可以渐变的,但是绝对不可以突变。针对速度逐级渐变值,AASHTO建议5mph,换算后约为10kph(图40)。
在符合条件的前提下,设计速度尽量取最大值,简单来说,曲线半径尽量避免取小值,更应谨慎采用极限值。而在几何线形恶劣的偏远山区道路,不宜强调通行能力的提升,应该以安全为主,合理的运行速度为辅。
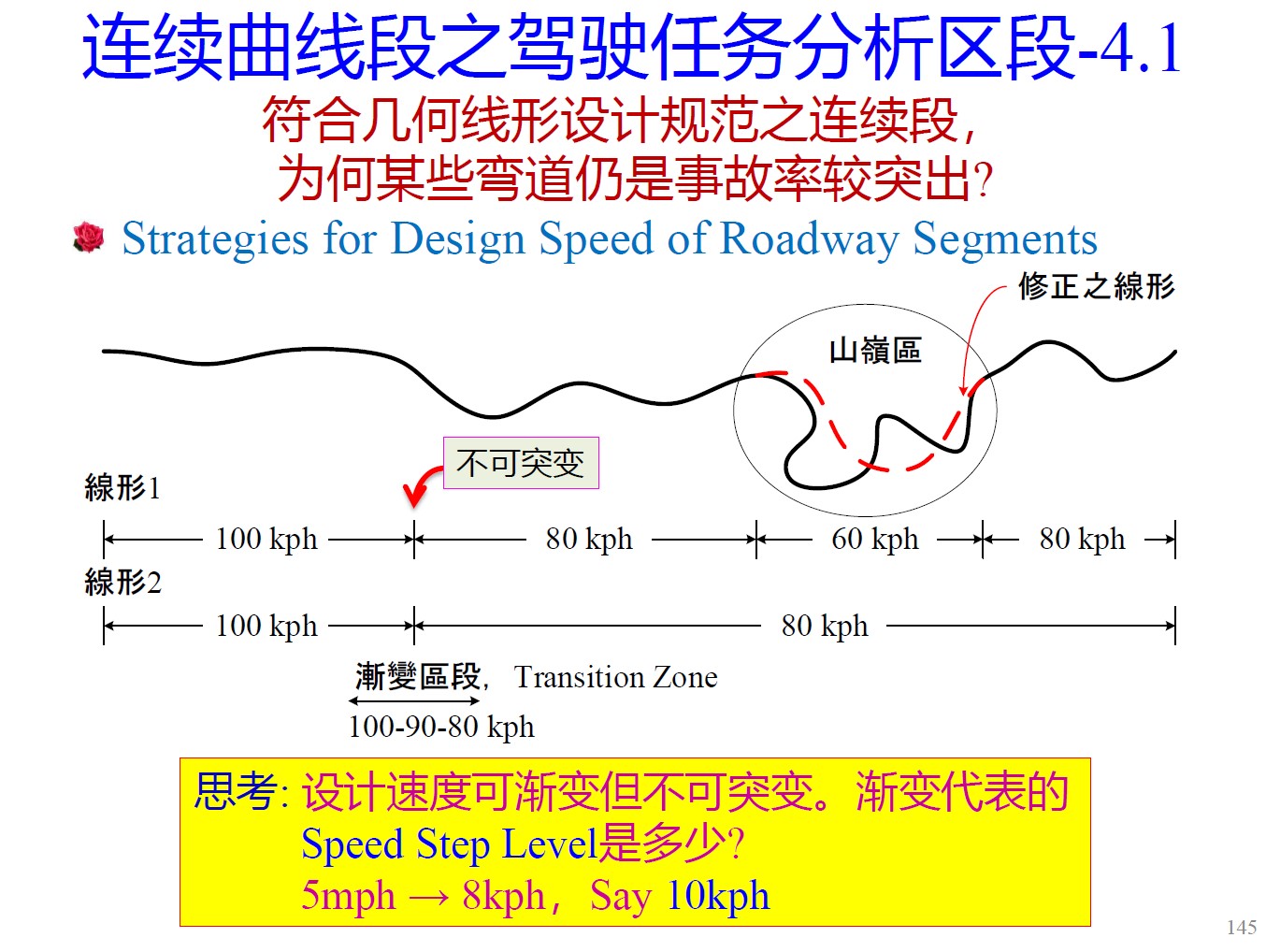
图40 连续曲线段的设计速度
6.2 接入管理
连续弯道路段接入口过多(图41),未进行相应的接入管理,易造成安全隐患。曲线段的接入口尤其应该谨慎布设,且应有完善的交通工程设施配套,例如中央分向双黄实线标,警告标志等。
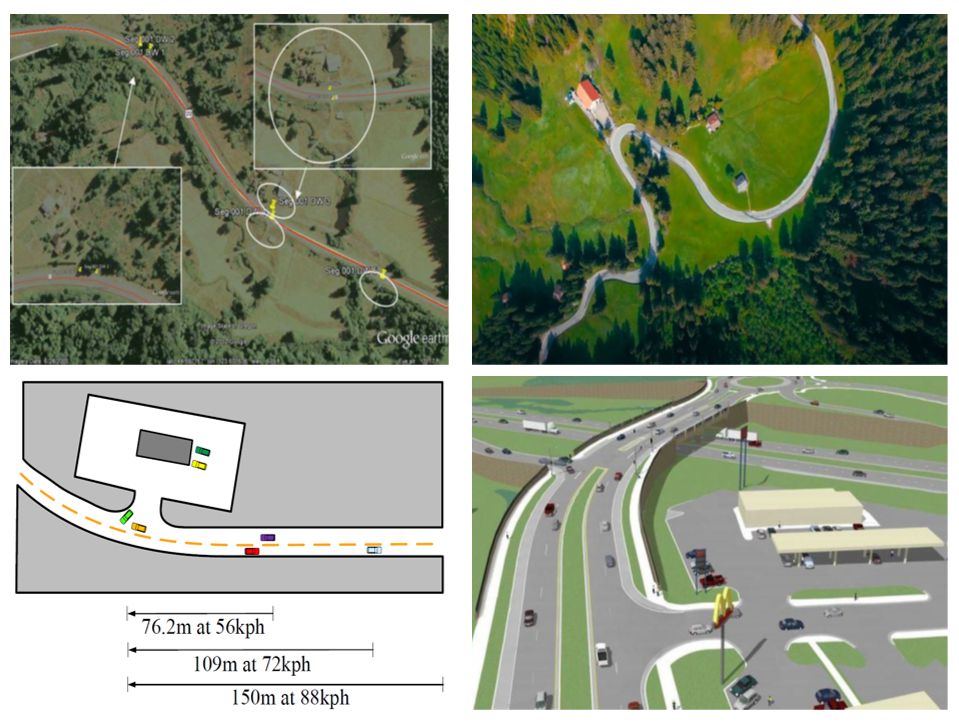
图41 连续曲线段接入管理搭配
6.3 狭路与服务水平
狭路的规划设计与传统的多车道干线公路(Multilane Arterials)不同,不必考虑到容量(Capacity)的问题,即与服务水平(LOS)无关。简单来说,狭路的规划设计必然以“安全”最优先考虑。
狭路曲线段如何引导驾驶人进行正确的驾驶行为?图42(a)为无视距遮挡的情况,A车进入曲线段前,应尽量靠近中央分向限制线,即应靠近车道宽左侧行驶,A、B车驾驶人相互明视的机会较高。而图42(b),存在视线遮挡,需要降低车速,靠右行驶。一般驾驶人对视距视区无明确概念,在狭路设计中,考虑速度管理和标志设计,可以更好地引导驾驶人进行正确地驾驶行为。
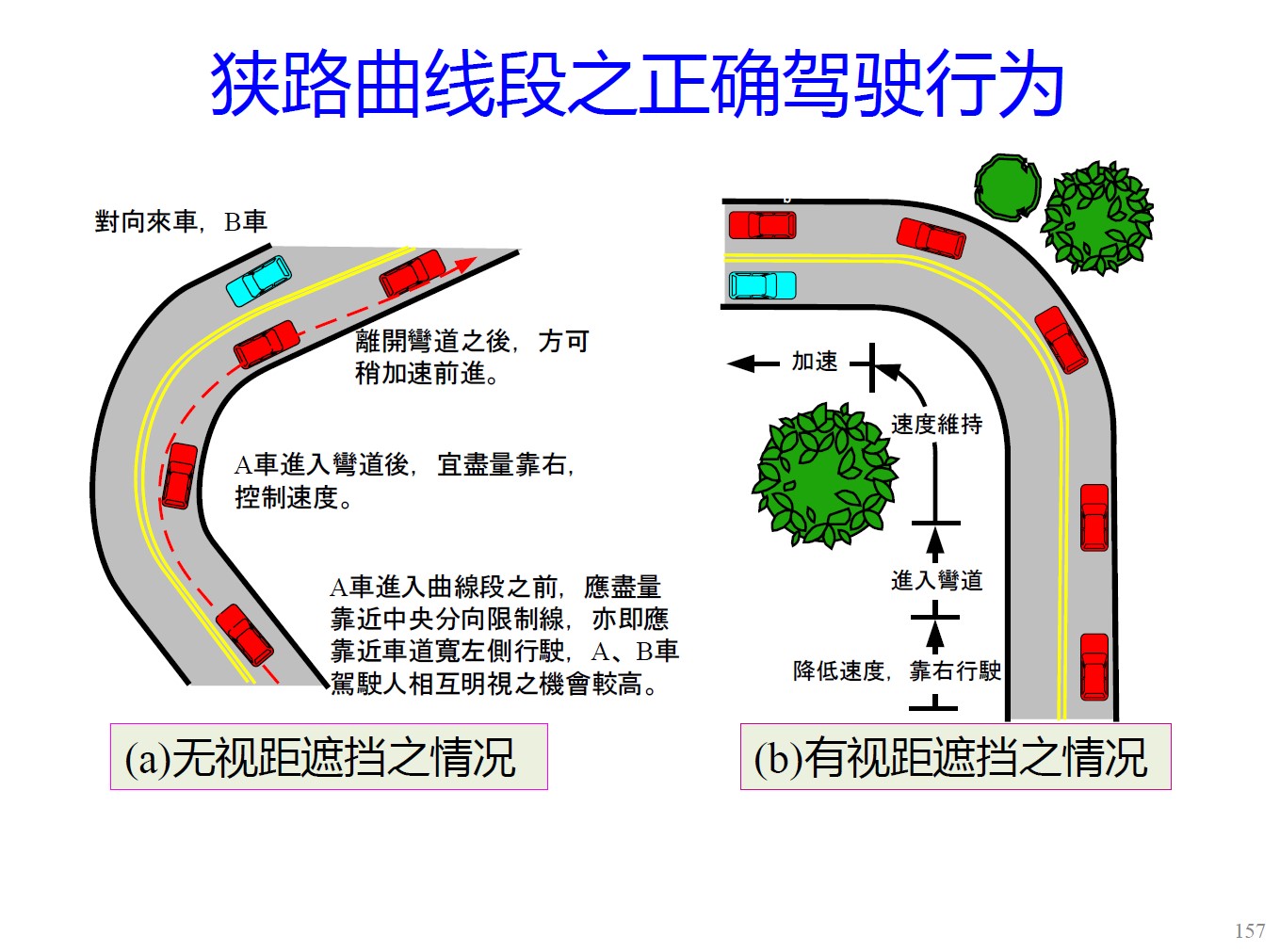
图42 狭路曲线的正确驾驶行为
徐老师对单一或连续曲线段的常见事故主因进行归纳(图43),基于图中所示常见事故主因,配合交通大数据系统如Application of Highway Data Management(HDM)和Crash Analysis System(CAS),可以进行很多有意义的分析。除了对单一事故进行事故鉴定之外,也可以利用长期事故历史记录建立驾驶负荷矩阵(DWL Matrices),进一步理清是否与驾驶任务有关。
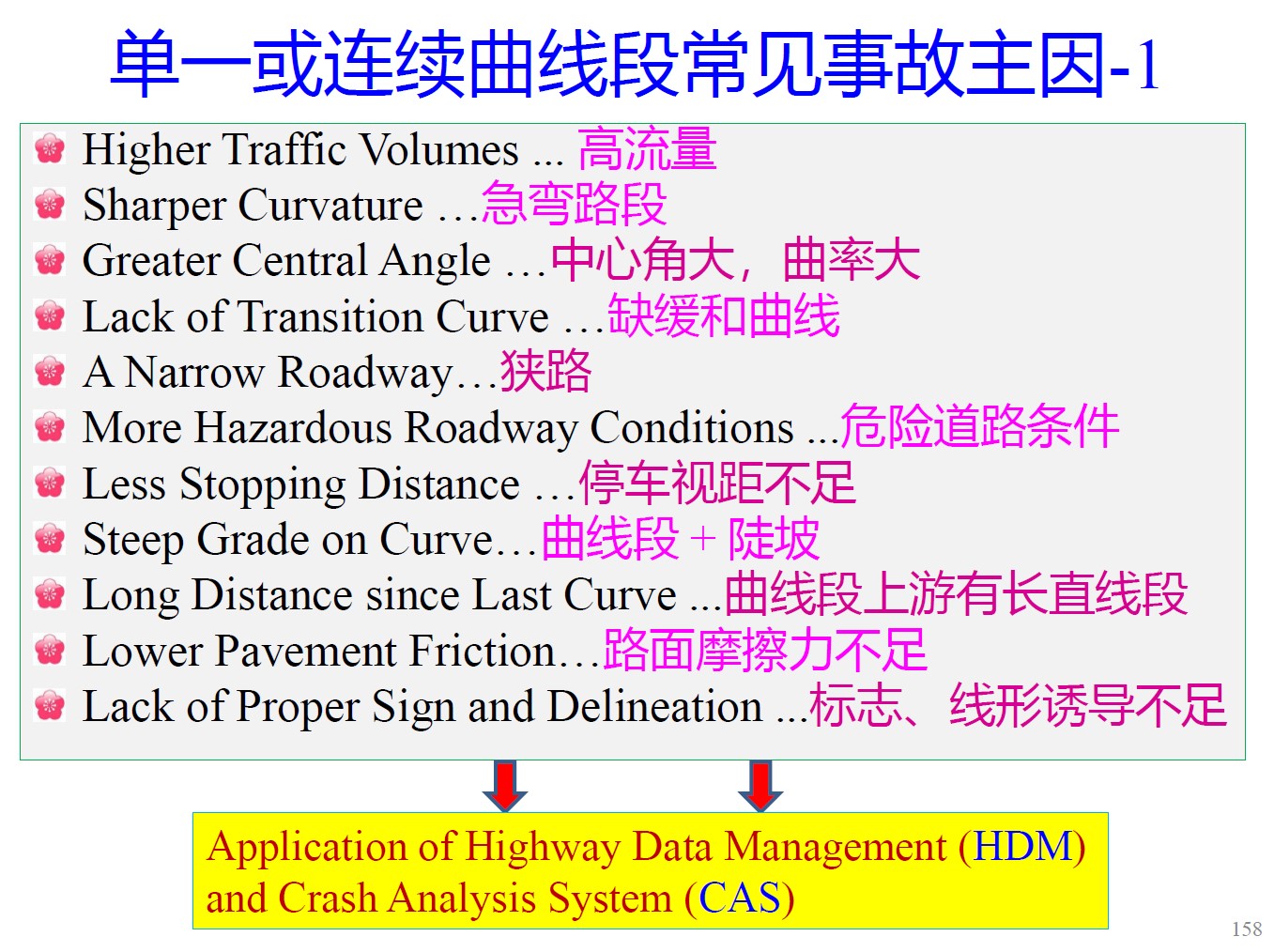
图43 单一或连续曲线段常见事故主因
6.4 公共设施的布设
公共设施应置于曲线内侧,车辆进入曲线,右转弯向左偏出以及左转弯向右偏出的事故率大于右转弯向右偏出、左转弯向左偏出的事故率,根据机率-风险度决定了公共设施的布设应该在曲线内侧(图44)。同时应注意,外冲区内不可布设任何刚性设施,路侧照明杆柱都应远离车辆外冲区。
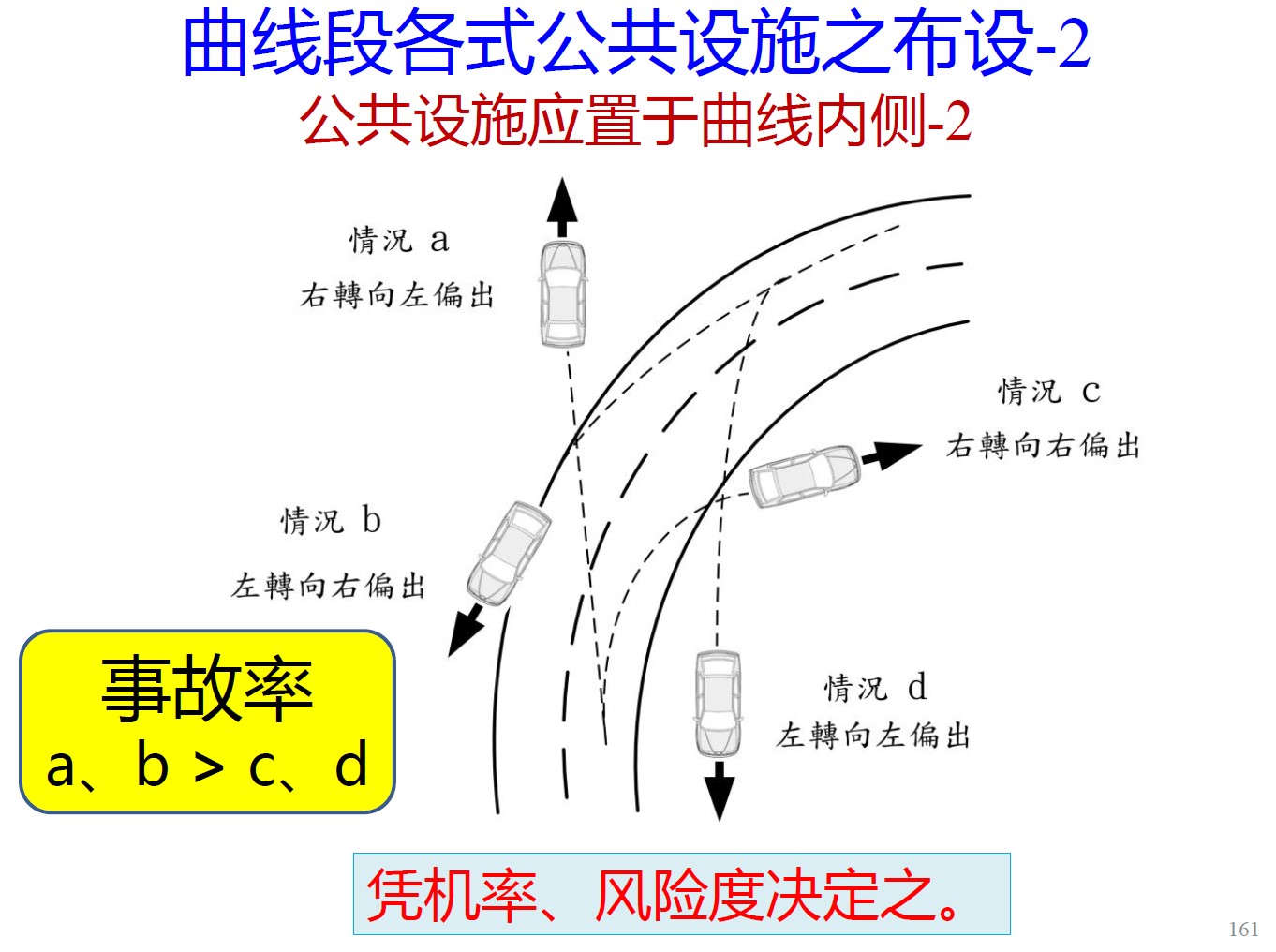
图44 曲线段公共设施的布设
【“同路人”交通安全技术论坛简介】
“同路人”交通安全技术论坛由同济大学、公安部交通管理科学研究所、交通部公路科学研究院共同发起,依托交通安全学科创新引智基地(“111项目”)、道路与交通工程教育部重点实验室、道路交通安全与环境教育部工程研究中心、交通安全国际合作联合实验室、交通安全研究信息共享平台,就中国道路交通安全的重点问题展开深入讨论,推动国家道路交通安全科研水平的提升和应用技术深化。
从2016年开始,“同路人”交通安全技术论坛已经开展了如下主题的研讨:美国《统一交通控制设施手册》(2016年9月)、高速公路安全重点问题(2017年8月)、基于行为分析的营运驾驶人安全教育(2017年9月)、道路安全设计(2017年10月)、事故多发道路判别与改善(2018年8月)、速度管理(2019年5月)、人因与道路交通安全(2020年6-7月)、道路路网结构合理性与整改思维(2020年10月)、道路路网结构之“接入”规划设计理念(2020年11月)、路权之工程、法律意涵与实务应用(2020年12月)、统一交通工程控制手册(2021年6-7月)。本次系列论坛主办单位为同济大学、公安部交通管理科学研究所、交通运输部公路科学研究院、“一带一路”国际交通联盟(BRITA)、上海市交通工程学会、上海市交通委员会科学技术委员会、中国公路学报、中国智能交通协会交通安全专委会。将邀请逢甲大学徐耀赐教授就“由驾驶任务进阶至道路交通工程设计”进行讲座,活动由交通安全学科创新引智基地(“111项目”)资助。