英特尔智能网联汽车大学合作研究中心(ICRI-IACV,Intel Collaborative Research Institute on Intelligent and Automated Connected Vehicles)由英特尔中国研究院于2018年发起建立,致力于携手中国顶尖的大学和科研机构,面向自动驾驶展开深入研究,加速技术的落地。英特尔智能网联汽车大学合作研究中心已经与清华大学、中国科学院自动化研究所、同济大学、交通运输部公路科学研究院、南方科技大学建立合作,各方围绕创新性的车联网应用、平行驾驶、自动驾驶的基础设施、数据集、安全保证等领域展开联合研究。
2023年8月24日至25日,ICRI-IACV研讨会暨项目总结会在南方科技大学顺利召开(图1)。本次会议由英特尔中国研究院、南方科技大学计算机科学与工程系和南科大海梁智能交通研究中心共同主办。英特尔研究、同济大学、清华大学、中科院自动化所、南方科技大学以及交通运输部公路科学研究院的研究团队进行了项目总结汇报和课题探讨。同济大学王雪松教授、朱晓蕾专职研究员、张学芳专职研究员、刘倩博士生和石若琳博士生参会交流。王雪松教授介绍了自动驾驶车辆安全决策与运行设计域研究工作总结和最新进展,团队进行了“自动驾驶车辆事故前场景”、“责任敏感安全模型的标定与评估”、“自动驾驶车辆运行设计域”海报交流。

图1 ICRI-IACV研讨会
英特尔与同济大学合作的“面向自动驾驶汽车的道路设施适驾性评估”(Evaluation and Improving Road Readiness for Autonomous Vehicles)项目于2018年9月启动,研究周期为3年。本项目将选取中国特色道路环境,建立3D道路仿真模型,开展自动驾驶仿真测试,实现对道路适驾性的评估,共完成九项研究任务(图2),发表28篇学术论文。研究成果可为自动驾驶技术在中国的安全优化提供技术支撑,也是对面向自动驾驶的道路改善设计的有益探索。
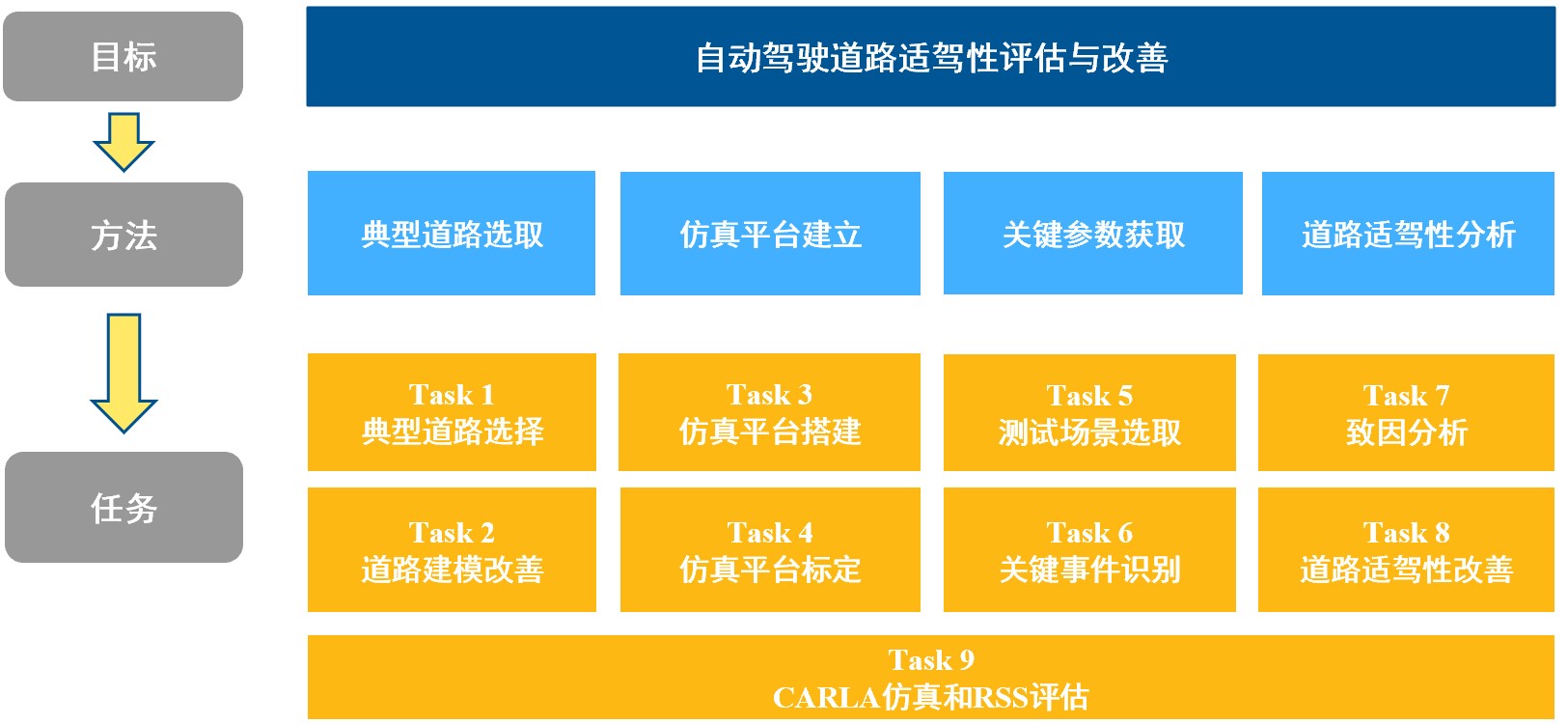
图2 项目目标与任务
在自动驾驶车辆的快速发展过程中,道路设施尚未充分考虑自动驾驶车辆安全行驶的需求,因此项目旨在针对这一问题提出面向自动驾驶的道路适驾性评估方法。对美国加州自动驾驶事故的分析发现,自动驾驶车辆的事故场景与人类驾驶的事故场景差异性明显,道路和交通环境因素成为重要的事故致因。当前的道路设计均针对人类驾驶车辆,难以充分支持自动驾驶车辆进行环境感知和路径规划。而路段和交叉口设计不合理、标志标线设计不完善等问题也会对自动驾驶车辆的安全运行造成挑战。为了给自动驾驶车辆提供安全可靠的驾驶环境,就需要对道路的自动驾驶适驾性开展评估与优化。王雪松教授的研究选取了我国典型道路,构建了事故场景库,开展了协同仿真和开放道路测试、标定并优化了自动驾驶安全决策算法、进行了道路运行设计域研究。
在事故场景库构建方面,利用多源数据构建了参数化场景库,支撑了自动驾驶开放道路测试。国内首次利用交通事故数据构建了43类事故前场景,国际首次基于自动驾驶事故数据构建了15类自动驾驶事故前场景,发现自动驾驶车辆被人类驾驶车辆追尾的比例(52.46%)是人类驾驶员追尾事故的1.6倍。基于自然驾驶数据(SH-NDS),生成了自动驾驶加速测试风险场景。形成了机-机,机-非,人-车三类专题场景库,开发了自动驾驶场景管理系统。研究成果丰富了上海市开放道路测试场景库,支撑了自动驾驶车辆关键技术测试的场景选取,支撑了通用、英特尔的车辆安全功能开发与测试。
在自动驾驶安全决策算法研究方面,系统地构建了复杂道路交通环境下的自动驾驶车辆决策控制模型,提升了车辆安全、效率、舒适性。国际首次考虑复杂道路线形构建了连续速度模型,预测结果的均方误差比断面速度模型低65%。国际首次基于自然驾驶数据构建了拟人化跟驰控制算法,速度均方根百分比误差比传统跟驰模型减少了3.30%-8.57%。国际首次基于自然驾驶数据标定了四类典型风险场景的责任敏感安全模型,时间综合TTC分别减少78.9%、46.2%、82.2%、85.0%(图3)。研究成果支撑了上海市开放道路测试关键技术研发,以及测试车辆监管与数据管理平台构建。责任敏感安全模型被纳入中国智能交通产业联盟2019年发布的《自动驾驶车辆决策的安全保障技术要求》,且成为国际电气和电子工程师协会(IEEE)制定的IEEE 2846的核心内容。
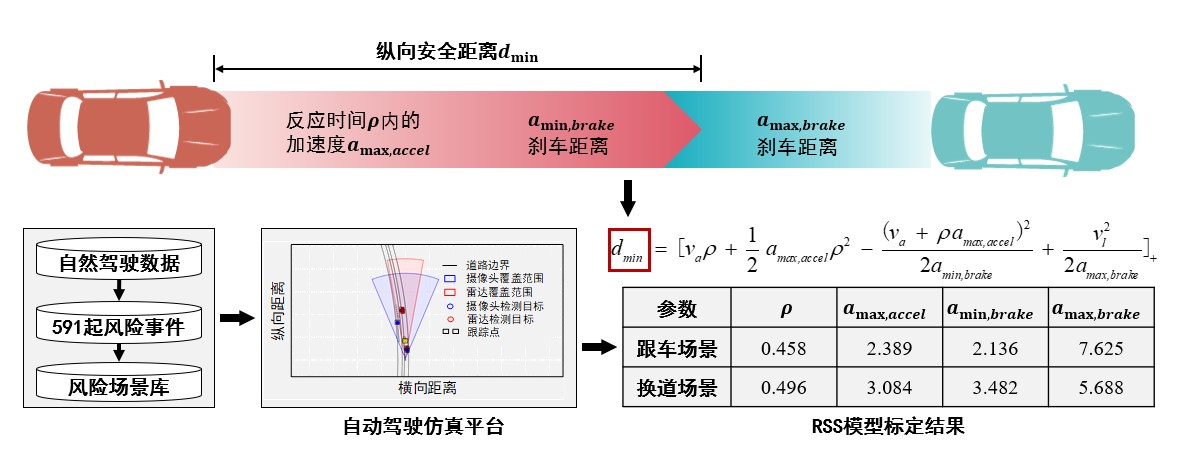
图3 跟车、换道场景下的责任敏感安全模型纵向安全距离标定结果
在运行设计域研究方面,量化了面向自动驾驶的道路关键设计指标,确定了面向自动驾驶的交叉口、路段运行设计域。国际首次量化了面向自动驾驶的4种控制交叉口、4种路段关键设计指标(图4),解决了面向自动驾驶的交叉口、路段关键设计指标的取值问题。研究成果支撑了上海市团体标准《交通事故多发道路治理技术指南》、《智慧道路建设技术指南》的编制,支撑了上海市自动驾驶开放道路适驾性测试与评估,支撑了“一环三路”的智慧化改造。
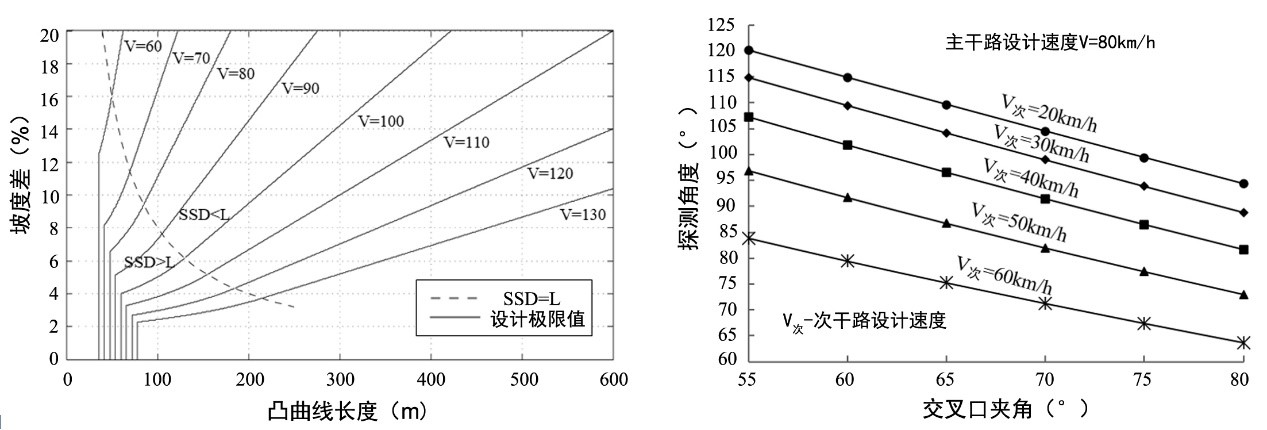
图4 自动驾驶路段凸曲线最小长度和交叉口夹角对探测角度的影响
2020年2月,同济大学王雪松教授荣获英特尔2020年度卓越研究者奖(Intel’s 2020 Outstanding Researcher Award)。英特尔在全球合作的学者达上千位,涉及量子计算、人工智能(Artificial Intelligence,AI)等前沿科技。在对每位学者的课题技术难度、合作成果、行业应用等因素综合评估的基础上,英特尔此次授予18位做出杰出贡献的学者以“卓越研究者奖”。王雪松教授在自动驾驶道路适驾性研究方面取得重要进展,成为国内首位获得英特尔卓越研究者奖的学者。该奖项是国际上对王雪松教授团队研究成果的重要肯定,也将激励团队继续开展更加全面深入的研究。
图5 团队合影

图6 参会者合影
供稿:刘倩、石若琳