由驾驶任务进阶至道路交通工程设计——驾驶任务之深层意义
主讲人:徐耀赐教授
时间:2021年8月8日
讲座专家介绍:徐耀赐,博士、教授。1979年毕业于台湾中央大学土木工程系,1989年取得美国马里兰大学土木工程博士学位。曾任职美国马里兰大学桥梁工程中心、美国康州工程顾问公司,长期从事道路、交通工程规划与设计,是美国注册之土木工程技师(PE)。1999年,入选世界土木工程名人录。
报告整理:霍俊妤、焦钰钧、王雪松;审核:徐耀赐
1 引言
目前,还有很多人对“驾驶任务”这一名词感到比较陌生,实际上驾驶任务是道路交通工程最前沿的设计。徐耀赐教授在美国博士期间提出“闻-思-修-定-慧”的思想,具体指:在所见所闻之后,需要自己进行思考,修正之后才能成为自己的智慧与思想。道路交通工程中也需要结合上述思想,将自然法则、经验法则和道路交通工程理论结合起来融缩为科学原理,在此基础上结合人—车—路—环境,可以演变成道路交通工程规划设计与管理的“道”(图1)。
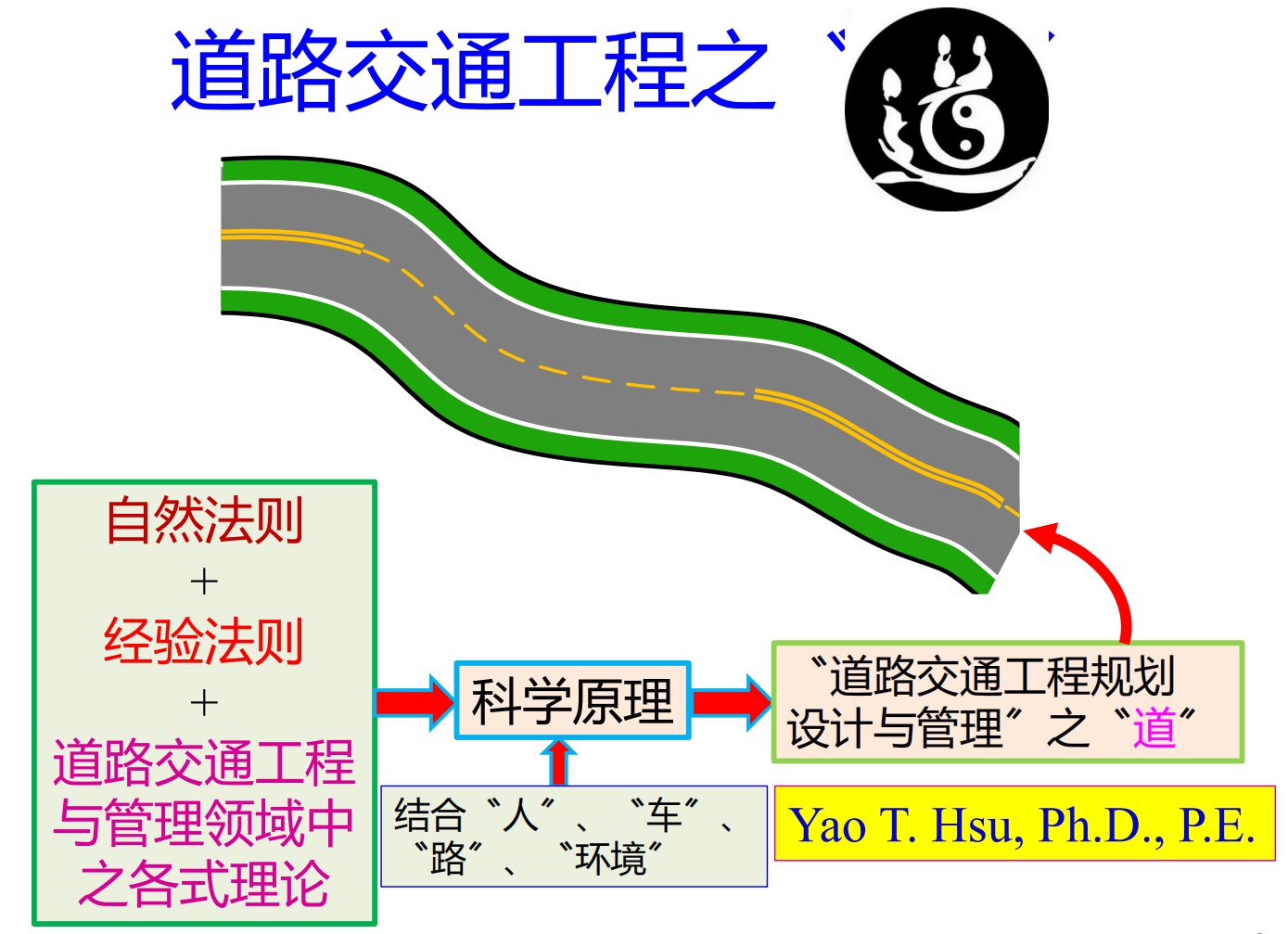
图1 道理工程设计之“道”思想
本次讲座的目的是了解驾驶任务的深层意义,深入思考驾驶情节任务(Task Analysis of Driving Scenarios, TADS)与道路交通工程规划设计的相关细节内容。同时,想要细致探讨驾驶情节任务分析的相关细节,需要提前了解人因(Human Factors)的相关知识,才能从根本上了解TADS的真正意义,并支持道路交通工程规划设计。(图2)
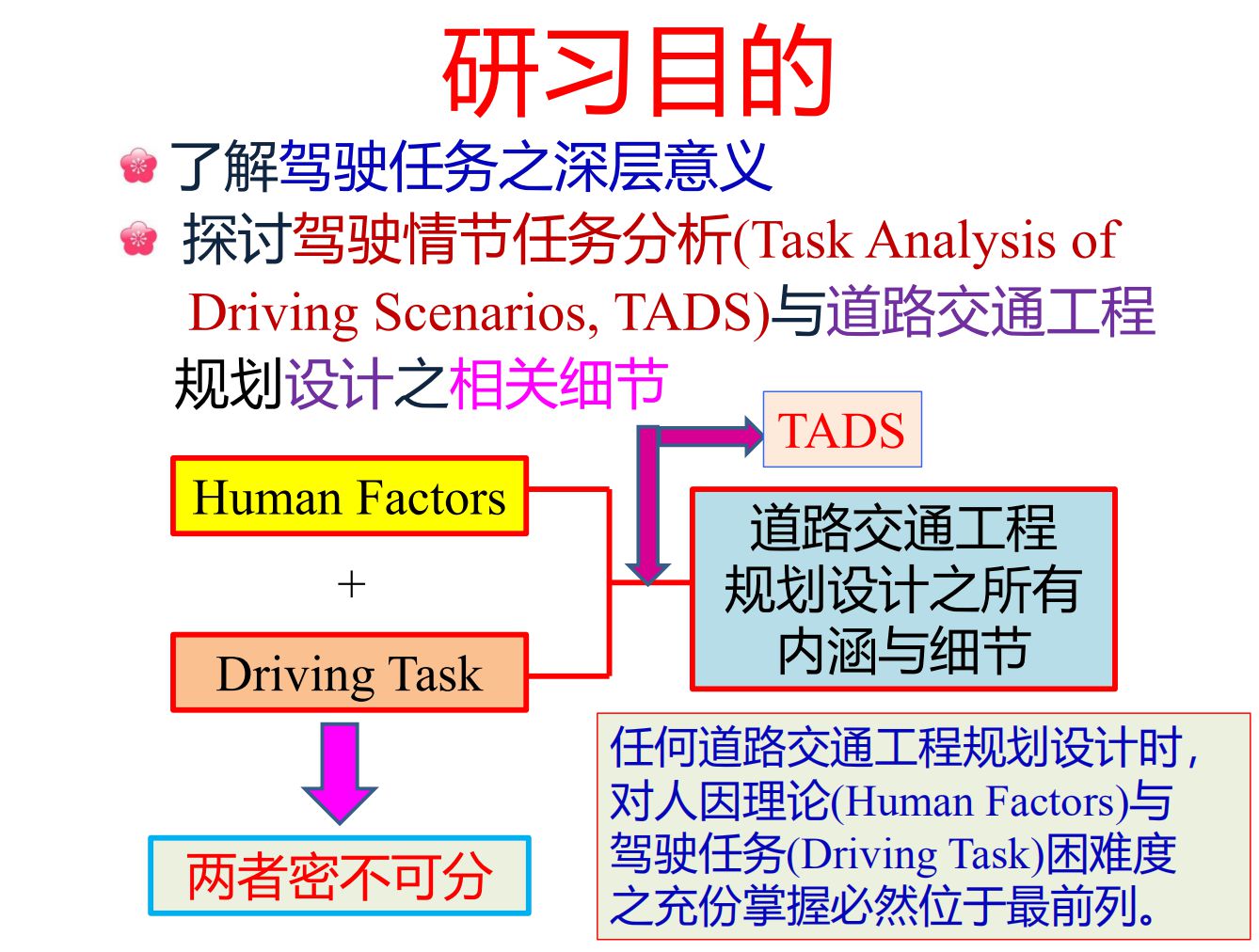
图2 驾驶情节任务的相关关联因素
针对驾驶任务,首先需要思考的是如何将驾驶任务完整应用于各式道路交通工程的设计规划细节中?人—车—路—环境是一个动态的系统,如何设计和管理是一个很重要的问题。因此,道路交通工程设计需要强调道路交通工程的系统性特色。但是目前大多数人只了解某一领域,导致交通工程中灰色地带的存在,不同交通工程领域之间会相互影响,最复杂的部分非真正的行家无法体会(图3)。
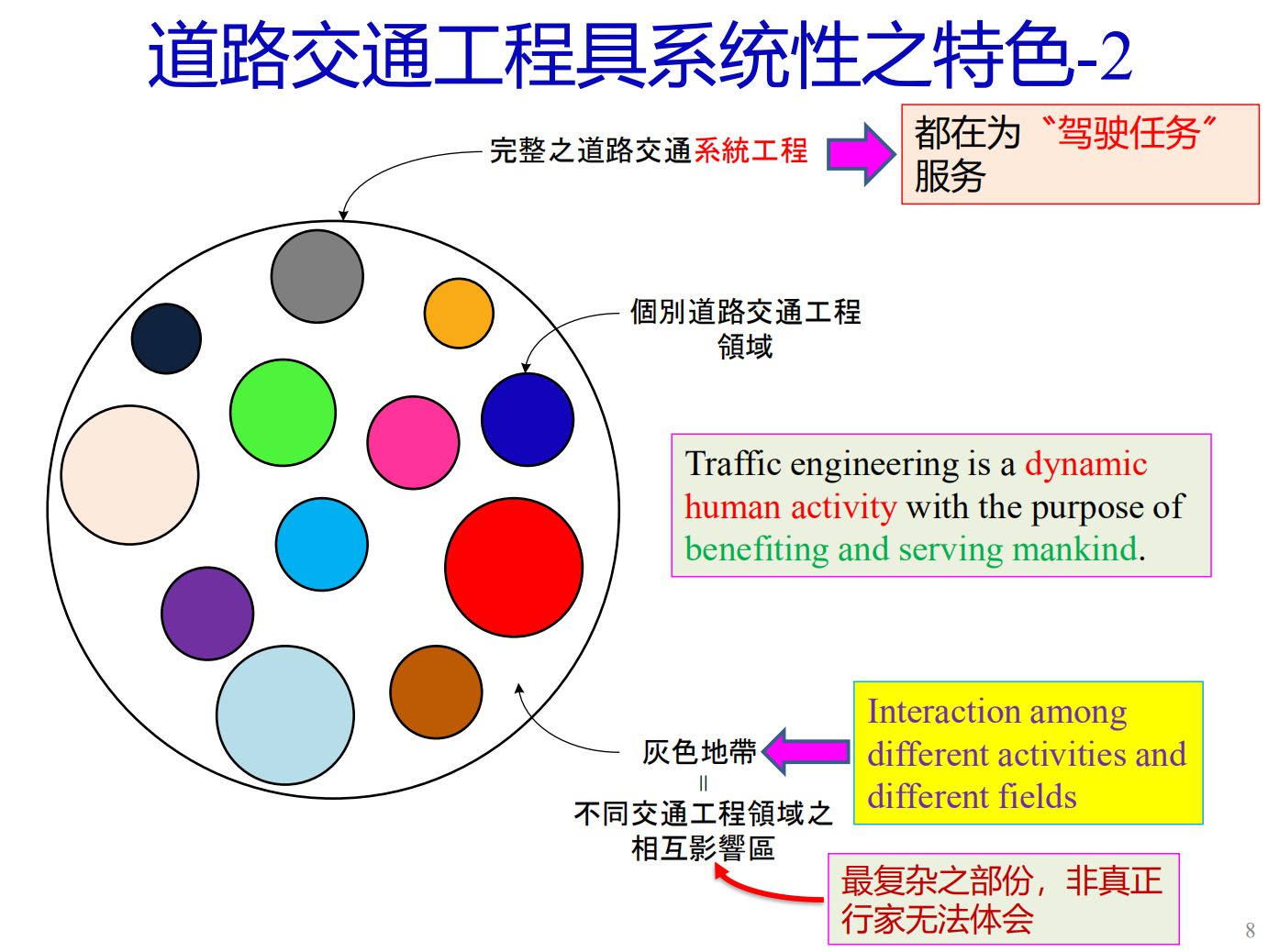
图3 道路交通工程系统之特色
因此,在道路交通工程规划设计时需要考虑横纵双向因素。纵向需要考虑几何线形、视距、纵向交通控制等,横向需要考虑横断面、视区、横向交通控制等。道路交通工程需要了解道路工程和交通工程两者的系统性知识,目前业界的共病是缺少对道路工程知识的学习。道路交通结构是三维空间,包括平面线形、纵断线形和横断面。学习道路几何线形设计是道路交通工程最重要的环节,包括路段和交叉路口,交叉路口分为道路-道路和道路-轨道,平面交叉包括3路、4路和多路,立体交叉也有很多形式(图4)。
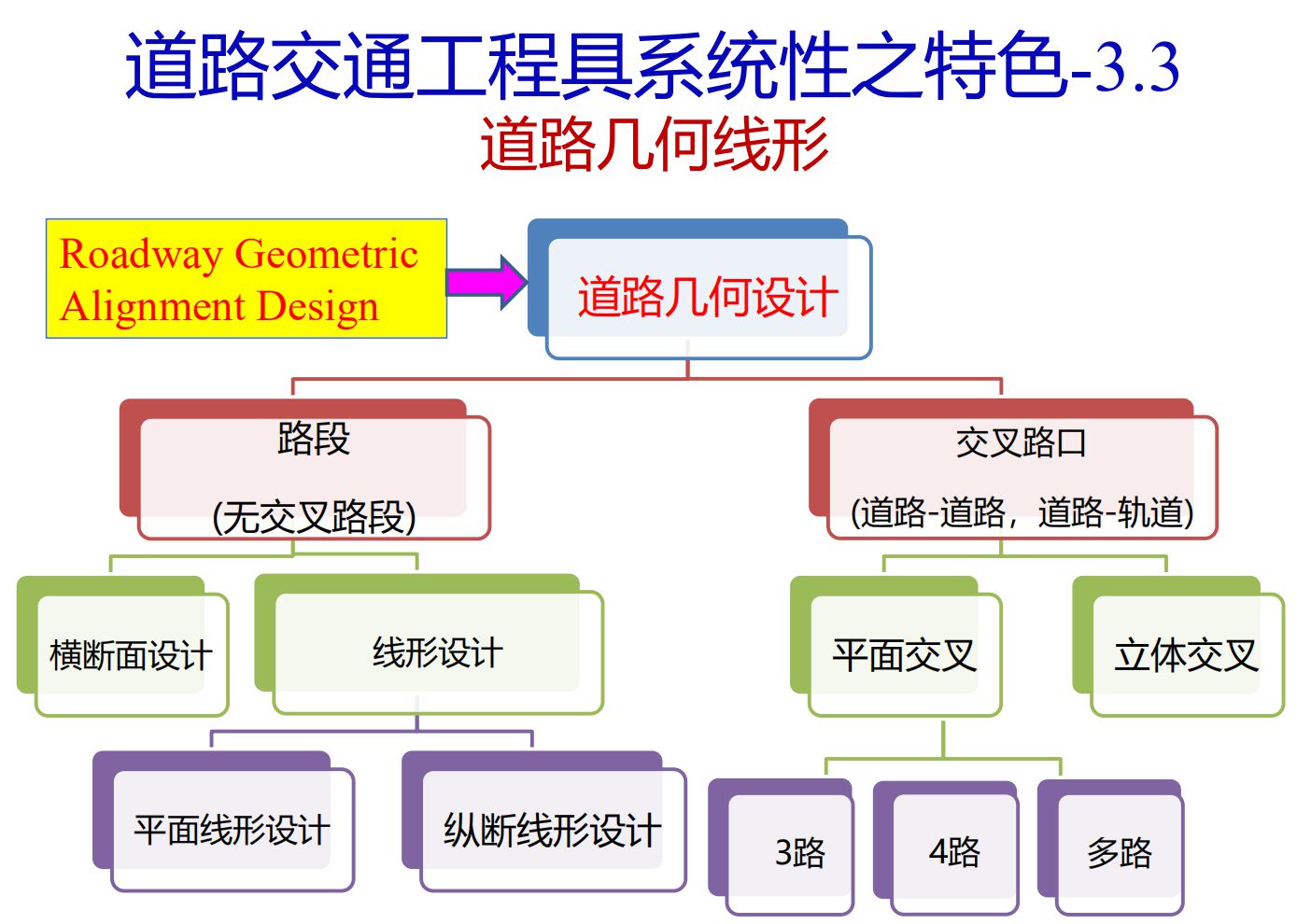
图4 道路几何线性
2 人因理论与驾驶任务
Washington DOT的一份报告中提到驾驶人是会犯错误的,因此在研究驾驶任务时,需要考虑人因理论。在道路交通工程规划设计时,考虑到的人因成分越淡薄,驾驶任务必然越困难,安全隐患越高。但是,人因因素的考虑是存在上限的,考虑过多也会对驾驶任务产生影响。如果将人因理论和道路规划设计结合在一起,针对一个人的先天自然反应进行整理,基本人因认知、记忆与回忆、视觉特性等都是最基本的反应(图5)。
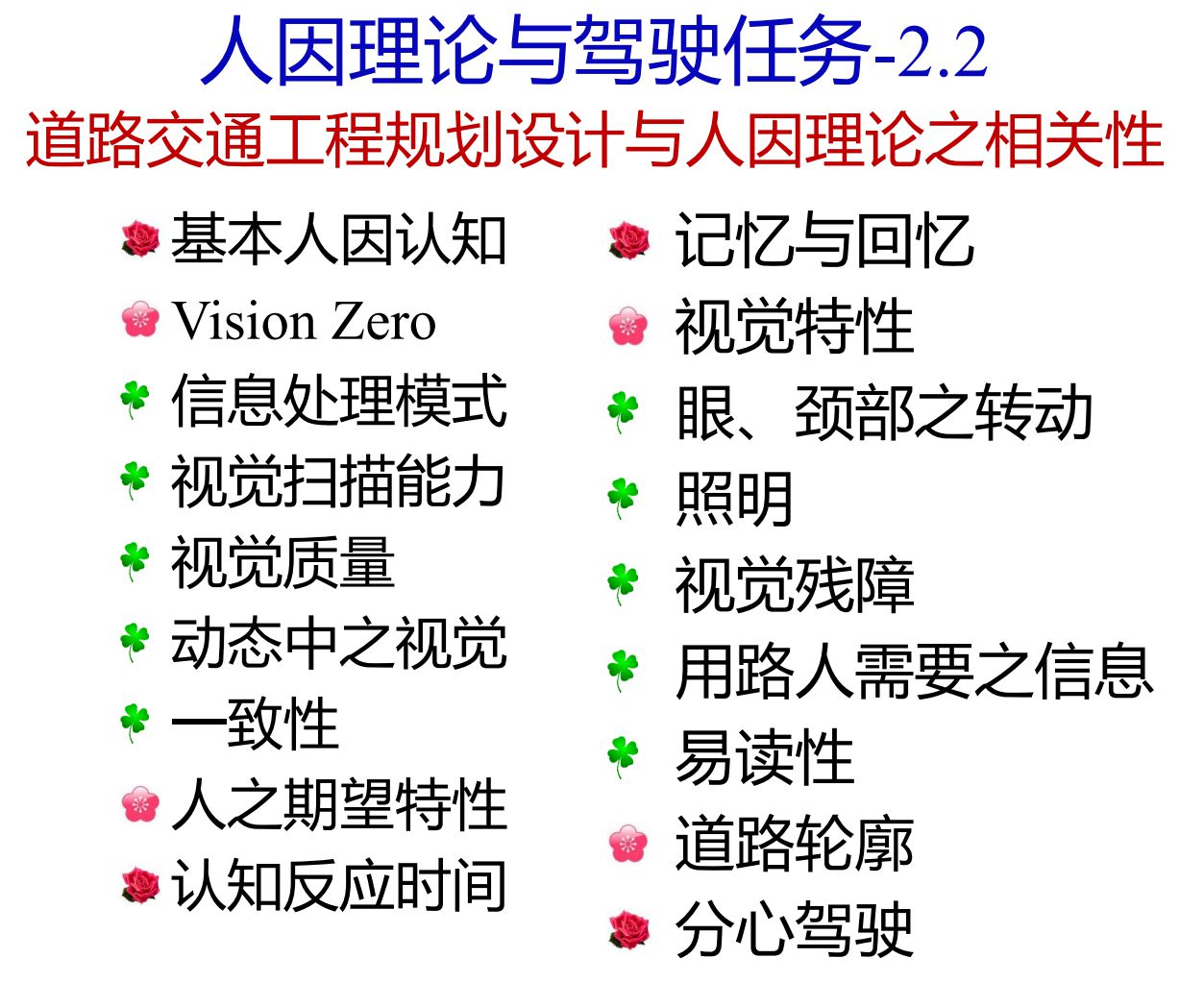
图5 道路交通规划设计与人因理论的相关性
人因理论与驾驶任务相结合中,还需要考虑Forgiving Design。Forgiving Design是指:容错设计或宽容设计;很多人会把容错设计无限上纲,这种思想是错误的。根据人因理论,人是有能力限制的,会犯无心过失,因此需要有容错设计的理念。但是任何道路交通工程设计都不能无限上纲,必须有其他相关理论作为支撑。目前,很多人将安全无限上纲,这样的做法是不可取的。同样,例如路侧危险地物的处理原则,上上策是移除,如果无法实现的话上策是重现设计,中策是移位,或者中下策布设解体消能设施,下策是布设防护设施,下下策是布设指示、警告设施(图6)。因此,容错设计是一个理念战略,作为(行为)则是一个战术。

图6 路侧危险物的处理原则
3 道路交通工程建设与驾驶任务的相互关系
驾驶任务出现在什么地方?首先从规划到设计,设计包括初步设计和细部设计。然后施工,最后通车管理养护,这一系列过程都需要与驾驶任务相关。特别从整个生命周期来看,通车后的管理养护时间最长,一条路的规划需要一年,设计需要一年,施工需要三年,通车后的使用年限可能是几十年,因此,通车后的管理养护非常重要对于驾驶任务来说。
从路网的概念来看,路网的设计通行能力假设为Cd,实际通行能力设为Ca,两者之间是存在差别的,通行能力损失为Cd-Ca。为了验证设计的道路是否符合初步想法,需要利用Highway Data Management,大数据是一个很宽泛的概念,可以应用在航空、轨道、公路等很多领域,在道路交通中,HDM就是需要什么样的数据、收集到的数据能够帮助解决什么问题。检测道路路网的原因主要包括两方面:一是交通安全绩效不佳,二是Capacity Loss现象一定很突出(图7)。
什么是Capacity Loss?举例来说,原路网有10万公里可以应对交通流,但是现在用15万公里的道路去应对相同的交通流量,就存在浪费Loss。表面上看需求流量增加导致道路大量新建,但实际上路网密度增加,道路通行能力却没有显著提升,导致恶性循环。上世纪的日本道路交通存在这类问题非常严重,目前我国也存在同样的问题(图8)。
规划设计在最前沿,在这个过程中需要有驾驶任务的思维。因此,道路交通工程建设的重点需要从未来的角度思考当前的设计思维。
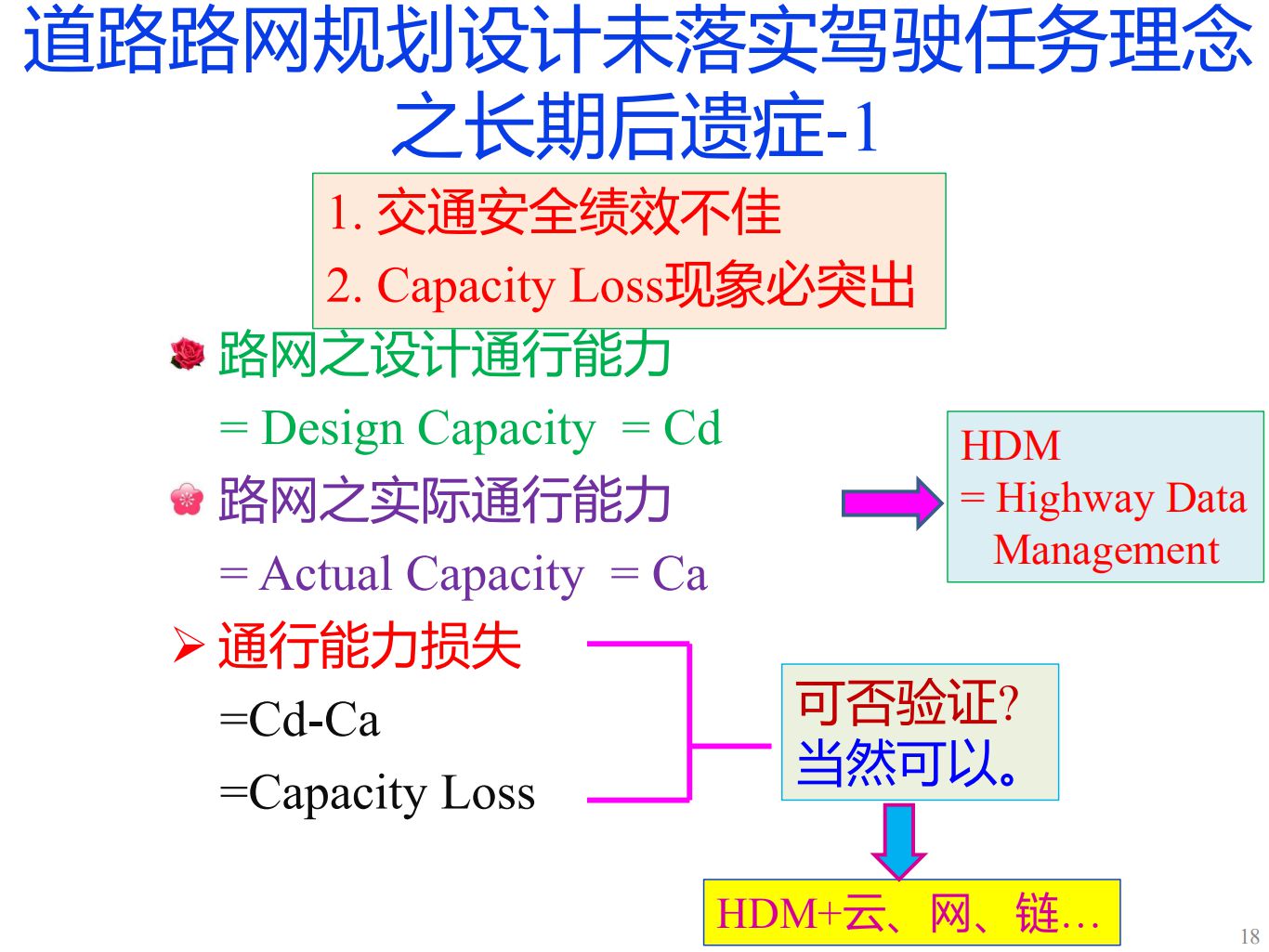
图7 路网规划设计对驾驶任务的影响
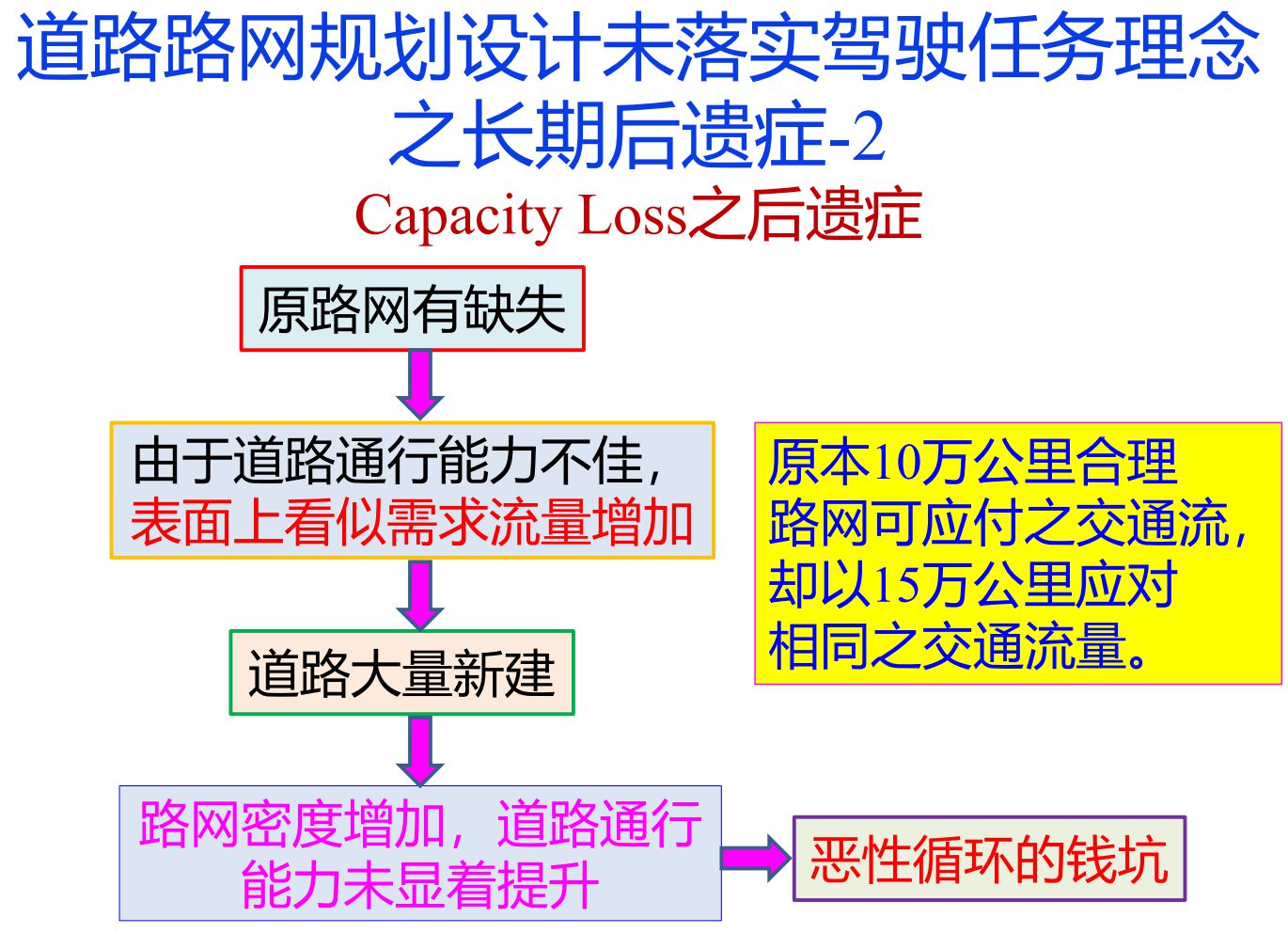
图8 Capacity Loss的影响
4 驾驶路径
驾驶路径指从起点行驶到终点,即驾驶人从O点到D点是在进行一项驾驶任务。对此,道路设计者需要思考:驾驶人沿途需要做什么?道路交通工程设计者需要做什么?两者之间怎么有效搭配?沟通的媒介是什么?
车辆驾驶人与道路交通工程设施之间沟通的媒介包括道路几何线形、道路横断面、交通控制设施以及其他道路硬件设施,对于几何线形,前方道路弯曲代表需要转动方向盘,这些设施都在与驾驶人进行沟通,驾驶人在驾驶过程中需要遵从(图9)。
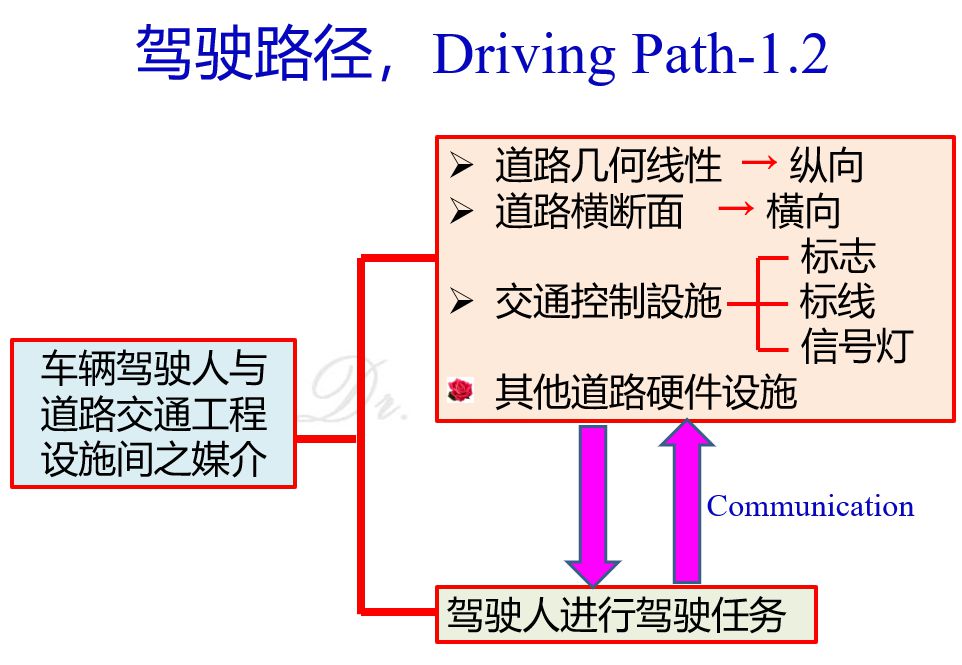
图9 车辆驾驶人与道路交通工程设施的沟通媒介
沿着驾驶路径,驾驶人面对的外部环境是会持续改变的,包括道路交通功能位阶改变,如高速公路到快速路到城市道路,道路几何线形变化,路侧环境变化,交通状变化,交通控制条件变化等,会存在时空环境持续变化,包括车流量、流量和交通量导致驾驶任务无持续变化;这也是道路交通的时空变化特性(图10)。
如果用TADS(驾驶情节任务分析)的概念去检验人因和驾驶任务,就可以知道高、快速公路及平面道路路网的路径指引信息设计非常重要,因此,驾驶任务和这些是结合的。有些人提出有电子导航之后,标志可以忽略,这个思想是错误的。可以参考美国报告,有些人也是会看到标志,看导航和看交通标志是不同的事情,导航可以帮助引导,但标志一定不能忽略。
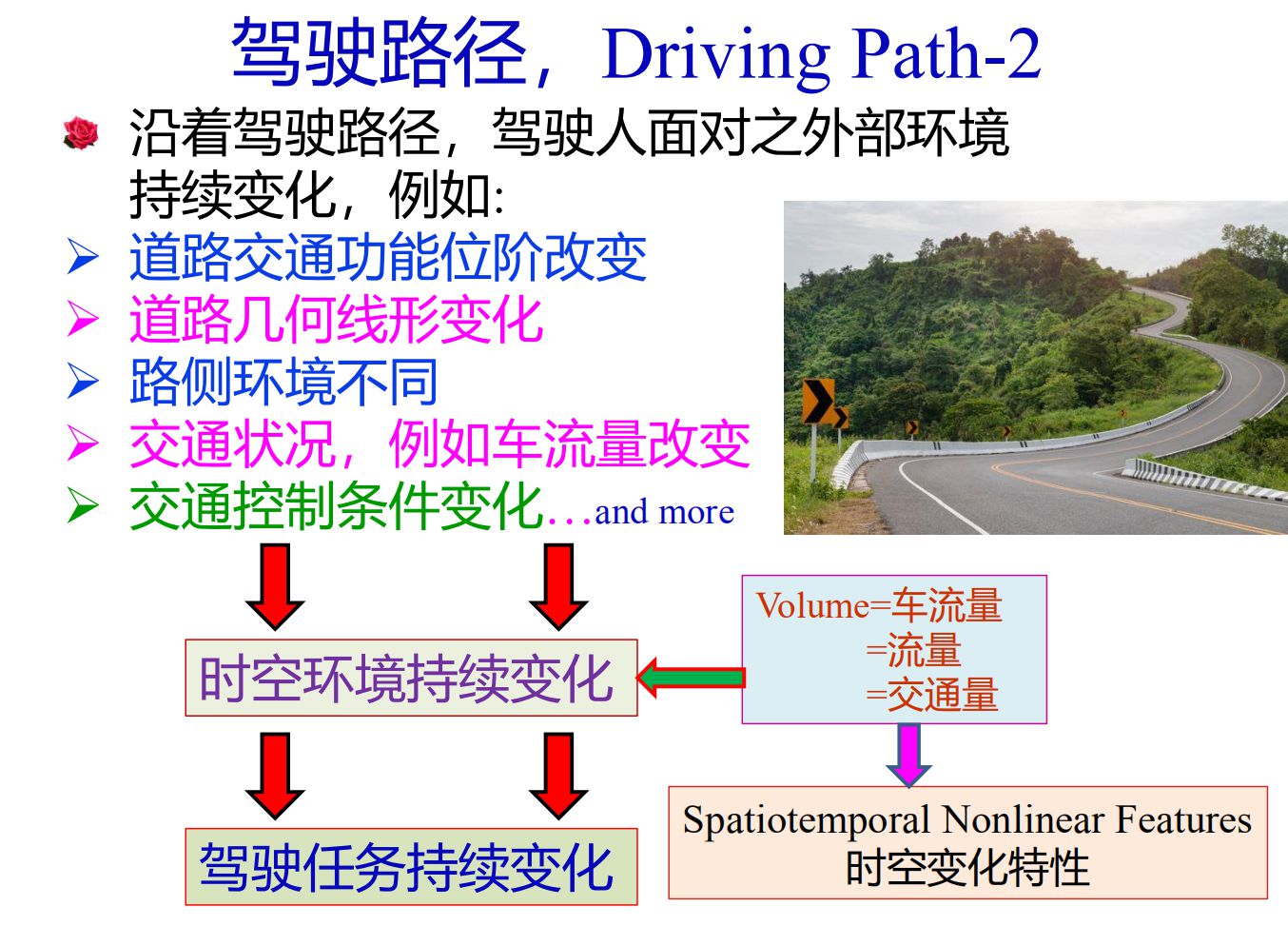
图10 驾驶任务与道路环境的时空变化特性
对于下图,从O1到D1、O2到D2,道路交通工程规划者可以根据专业习性分段,划分为很多驾驶区段(Driving Segment)。针对个别驾驶区段,都可以进行独立的TADS。以经验来看,TADS在市区道路中是最重要的,而非高速公路。如果问道道路系统设计在哪个类型中最复杂,答案是城市里面的干线道路,尤其是有信控的干线道路,而非高速公路。(图11)
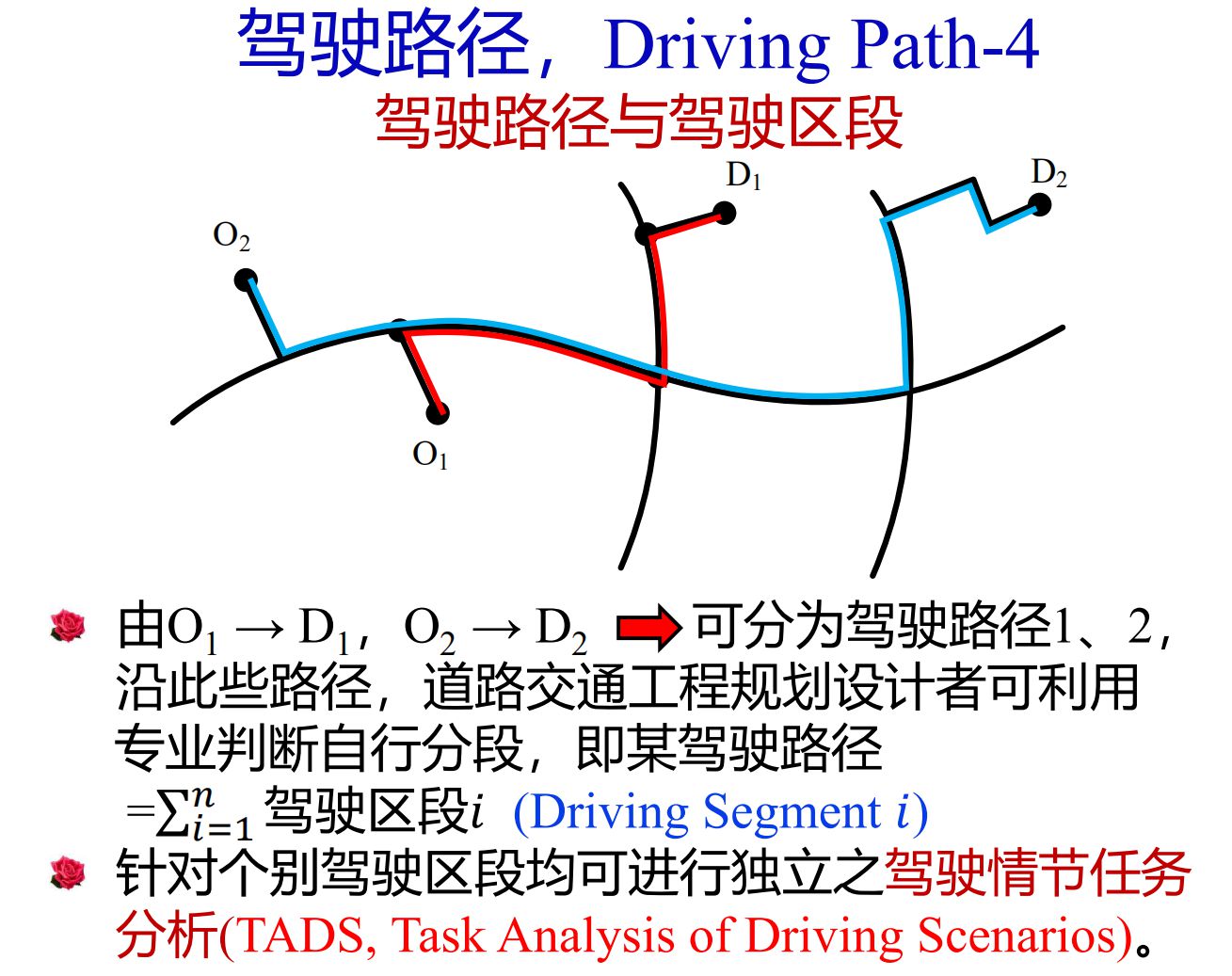
图11 驾驶路径与驾驶区段
在驾驶路径中包括多种车辆动线,例如:起驶、直行、穿越和转向等(图12)。在下述行为中,除了正常跟车外,有很多驾驶行为都属于危险驾驶,法规应该是需要另有配套处罚,但是在道路交通工程设计中,不考虑“不正常、危险驾驶行为”。(图13)

图12 车辆动线类型
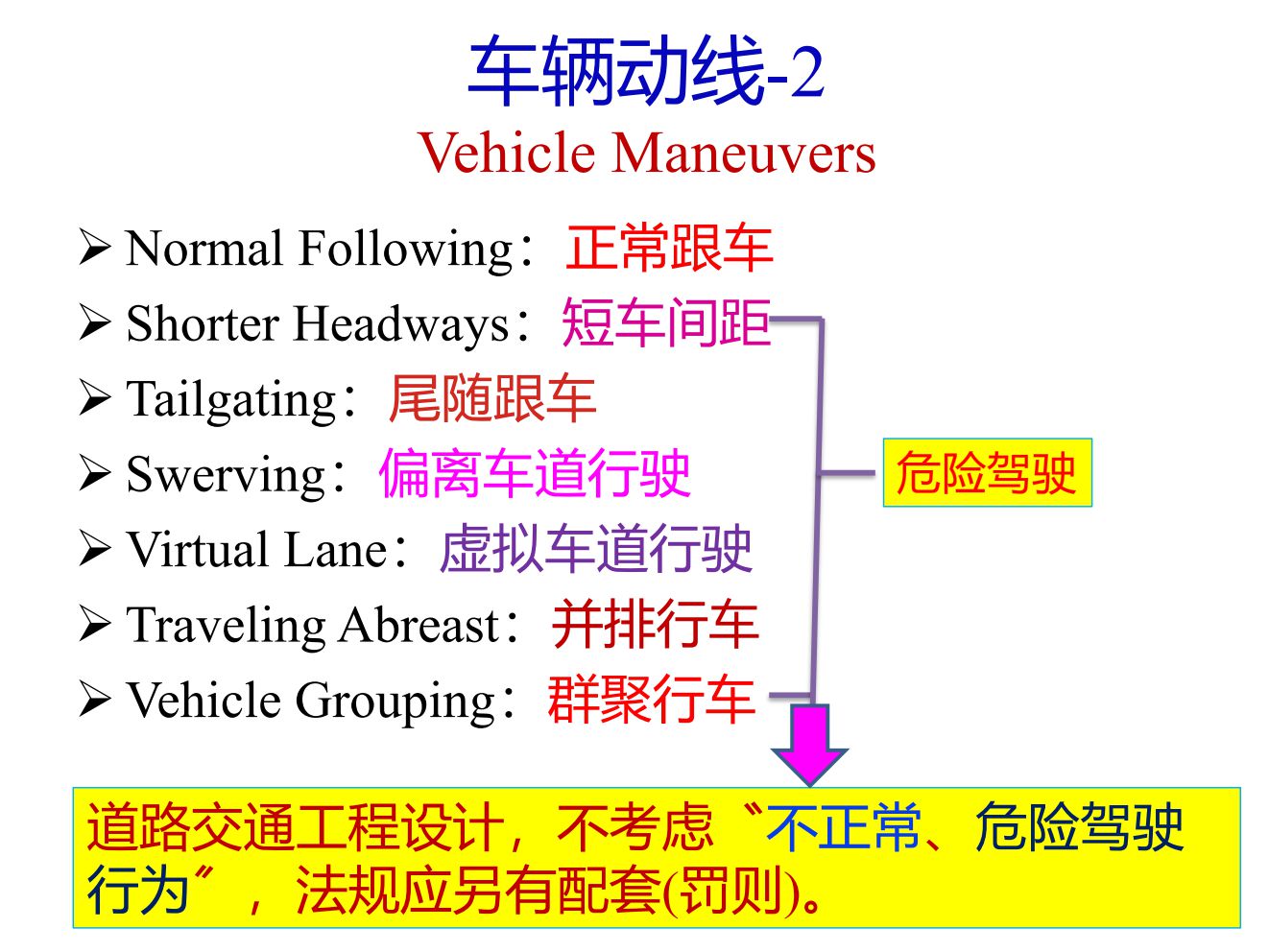
图 13 驾驶行为类型
沿着驾驶路径,驾驶人在面临各种外部变化时,道路交通工程规划设计及管理单位扮演重要角色,有一些事情属于驾驶人自己负责、独立面对,这属于教育层面。驾驶人面对的各式外部环境变化包括两种:可控性和不可控性。绝大部分属于道路交通工程规划设计范畴,如几何线性、限速等。但是有一些事情事前无法预期,具有突发性,驾驶人必须独立面对,如小孩突然冲到马路中间,因此这些需要结合保险理念和急难救助机制。(图14)
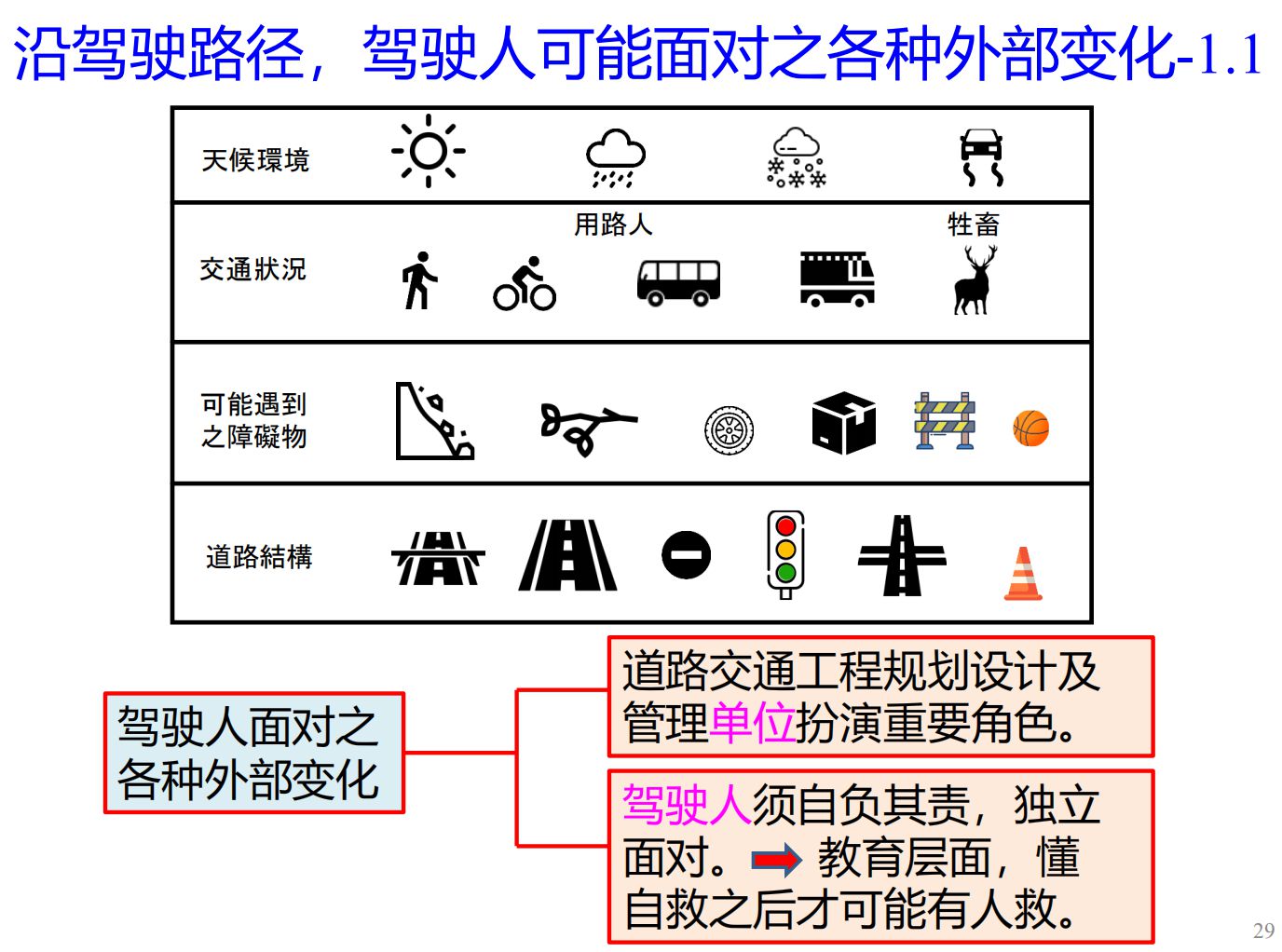
图14 驾驶人面对的各种外部变化
5 道路设计者与道路使用者
道路设计者与道路使用者的立场是不同的,例如,道路交通工程设计者是用距离-速度作为准则进行设计。但是驾驶人通常以距离作为主观判断。由此延伸,可以知道为什么有些车道纵向虚标线是6-9线,有些是4-6线。任何道路交通工程只要背离一致性,必须要格外谨慎,创新需要小心。从设计者的观点,道路交通工程设计应该从专业的角度,具有复杂性。但是到用路人的观点,就需要十分简单。例如信号灯系统设计,针对路人,只需辨别信号灯颜色,就可以知道通行路权。
如下图a例子所示,对于信号灯,用路人只需要知道红黄绿三种颜色,但是设计者心中的信号灯,有四种时段,红色中额外划分一个区域,这就是两者之间的区别。如b例子所示,这个路口前方的路段设置双黄线,车辆只能右转,如果转到对面车道需要绕一圈掉头,设计原意明显违背人因,用路人不会遵守。可以统计交通违规数量,可以用来检验道路交通工程的相关细节。
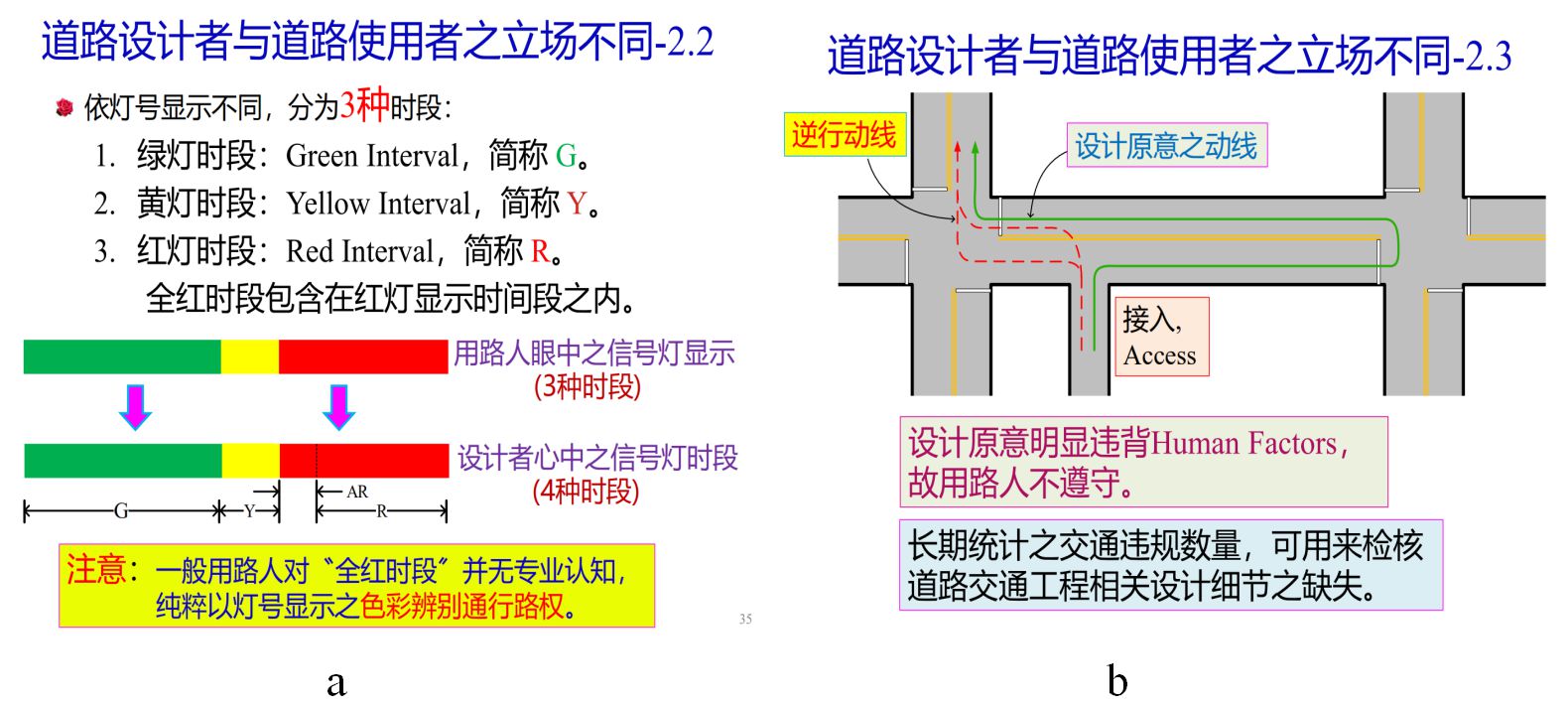
图15 道路设计者与道路使用者的不同立场
6 驾驶任务
驾驶任务分为三个层次。第一层是控制(Control),驾驶人本身需要掌控车辆,自负其责,第二层是指引(Guidance),与前后左右与车辆及周边环境的互动关系,与人车路皆有关。第三层是运行(Navigation),看到的标志与目的地相关则需要调整路线,这是非常基础的。驾驶任务的三阶需要和SCD(Safety Conscious Design)结合,其中安全是第一位。有些ITS设施,即高科技设施可以起到帮助作用,但是不可能完全取代人。大陆的交通安全法及台湾的道路交通安全规则,这些会强调一些概念,与指引(Guidance)是直接相关的,会告知驾驶人在某些情况应该和其他车辆如何互动。
完全自动驾驶车辆距离当前还很遥远,原本驾驶人会犯的错误,无人驾驶车辆也不一定能够避免同样的问题。汽车制造商也没有办法承担所有交通事故后果,科技无法完全取代人。
驾驶任务中的控制是针对微观交通流,针对个别车辆,驾驶人操控车辆,加速减速、变换车道等等。在交通领域中的控制,是针对整体宏观车流,包括标志、标线、法规、信号灯等。两种不同,不能混为一谈。微观车辆和宏观车流之间是互斥的,个人驾驶人操纵车辆时,会受制于宏观车流的影响,路上拥堵时无法变换车道。
驾驶任务中,控制、指引和运行是由旅次起点至终点,沿着驾驶路径持续、不间断,不能有分心和疲劳(图16)。分心驾驶是驾驶人无意中遗漏驾驶任务中的“工作”,疲劳驾驶是驾驶人无法确实有效掌握驾驶任务的节奏或内涵。美国一项报告表明,分心驾驶最为严重的人群包括年轻人、中年人、离婚前后三个月的人。这种分心驾驶交警无法控制,这种追责制度只依靠交警是不合理的。疲劳驾驶也不能无限上纲,有一些设计太过复杂,也没有意义。分心驾驶和危险驾驶达到驾驶任务的程度远低于正常驾驶,但是这属于个人因素,无法控制。
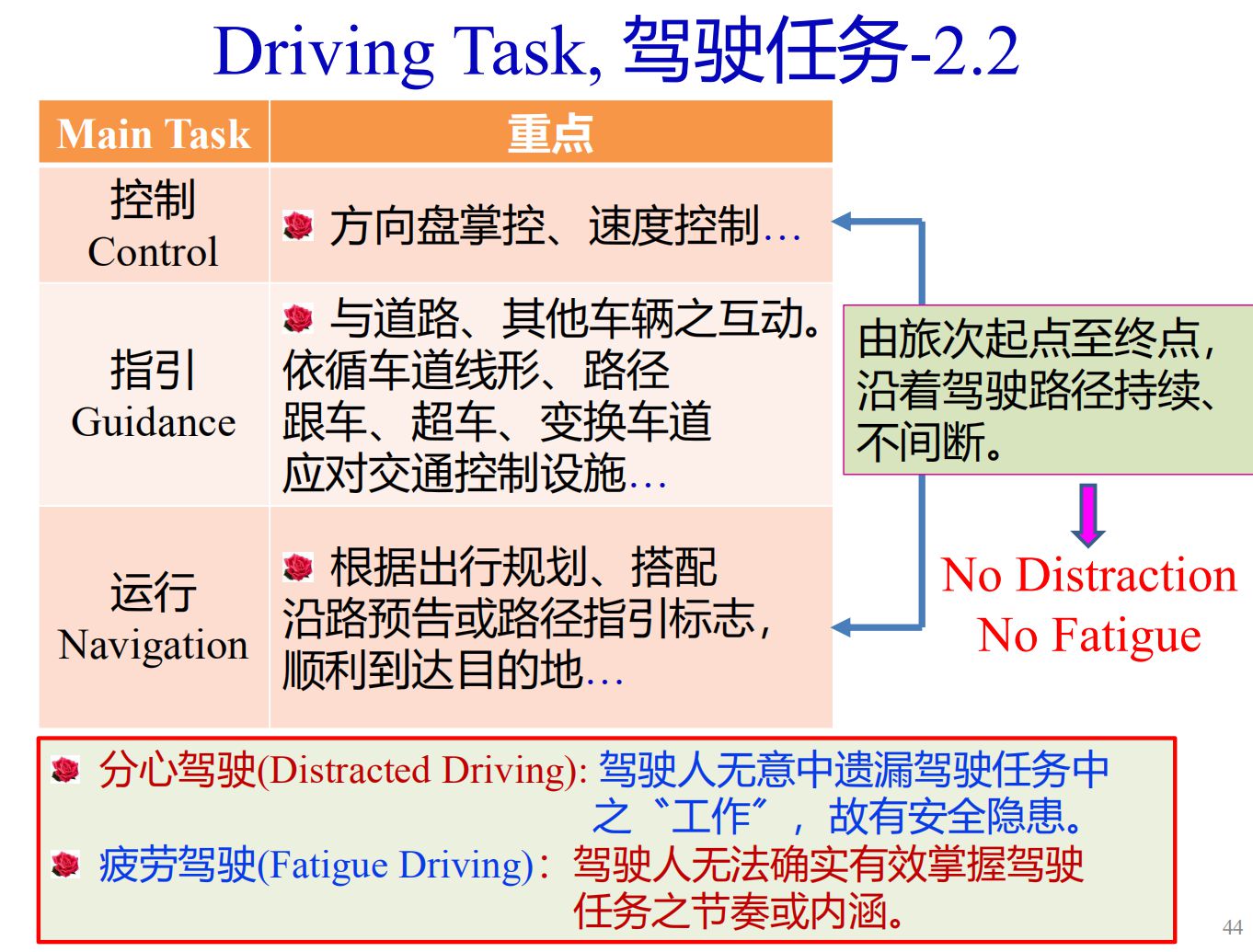
图16 驾驶任务三个层次具体内容
避免分心驾驶、疲劳驾驶,安全顺利完成驾驶任务,主要依靠驾驶人的自我管理。在一些道路环境下,道路交通工程也可以扮演证明积极的角色,如放置标志提醒等,但是不能做的太过。分心驾驶1.3s车辆按照70kph已经行进了25m,执法者千万不要尝试过度承担驾驶人本身应尽的责任义务和应扮演的角色。需要驾驶人自我管理。
截止至今,美国MUTCD还在更新,以安全性和一致性为主体,简单明了。必须要考虑到所有的用路人,新版增修的适用期限至少为10年,必须符合多模态运输易行性。(图17)
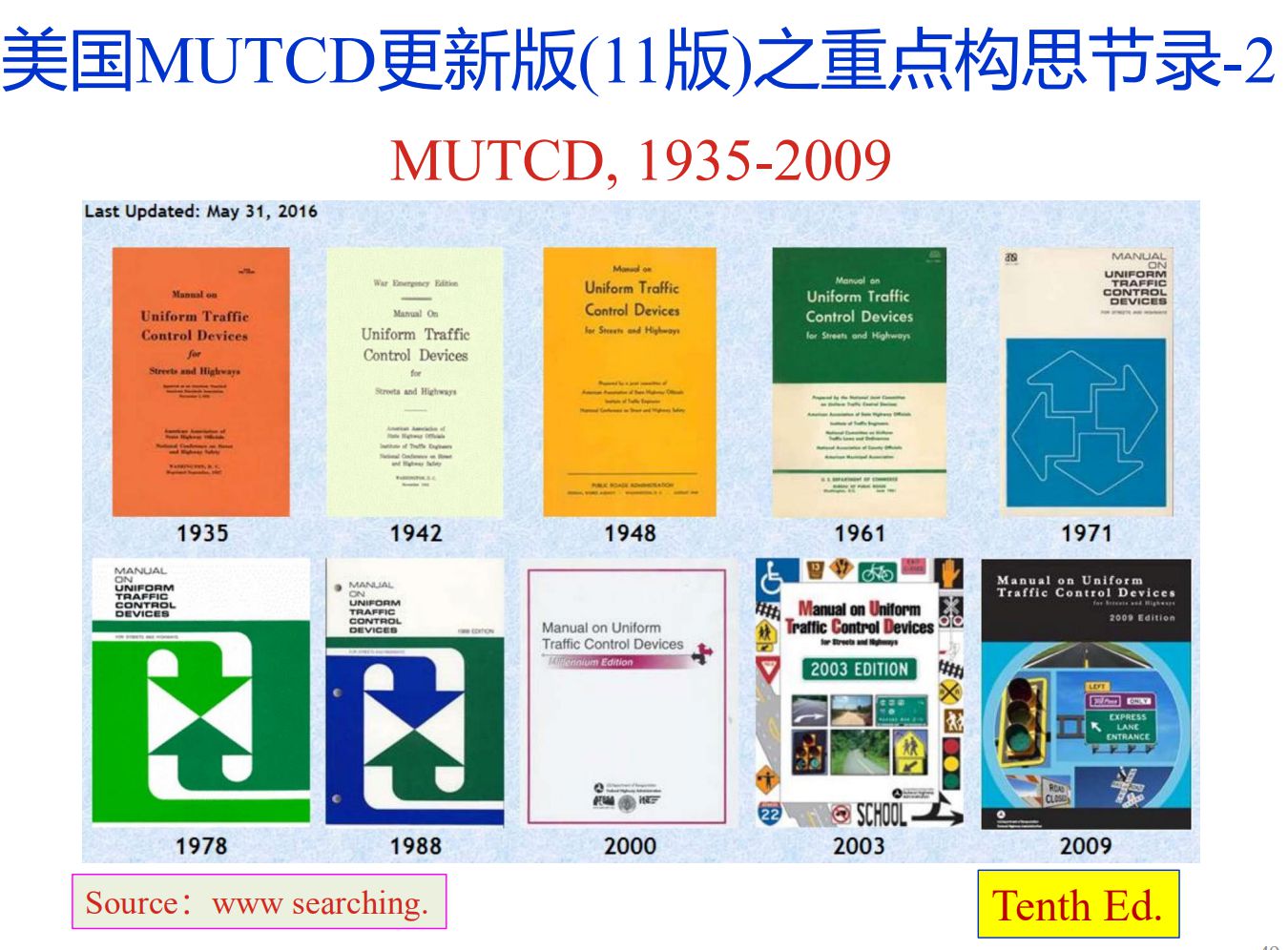
图17 MUTCD更新版重点内容
6.1 驾驶任务与信息处理
驾驶人透过身体正常机能,吸取道路上各式信息,进行相对应的驾驶行为,这里就是需要信息处理,与驾驶任务中的控制、引导有关。信息传输的三大步骤,第一是能看到标志标线的存在,第二是知道内涵,第三是有时间可以进行应对;即可视其存在、可知其内涵、可正确行止(图18)。
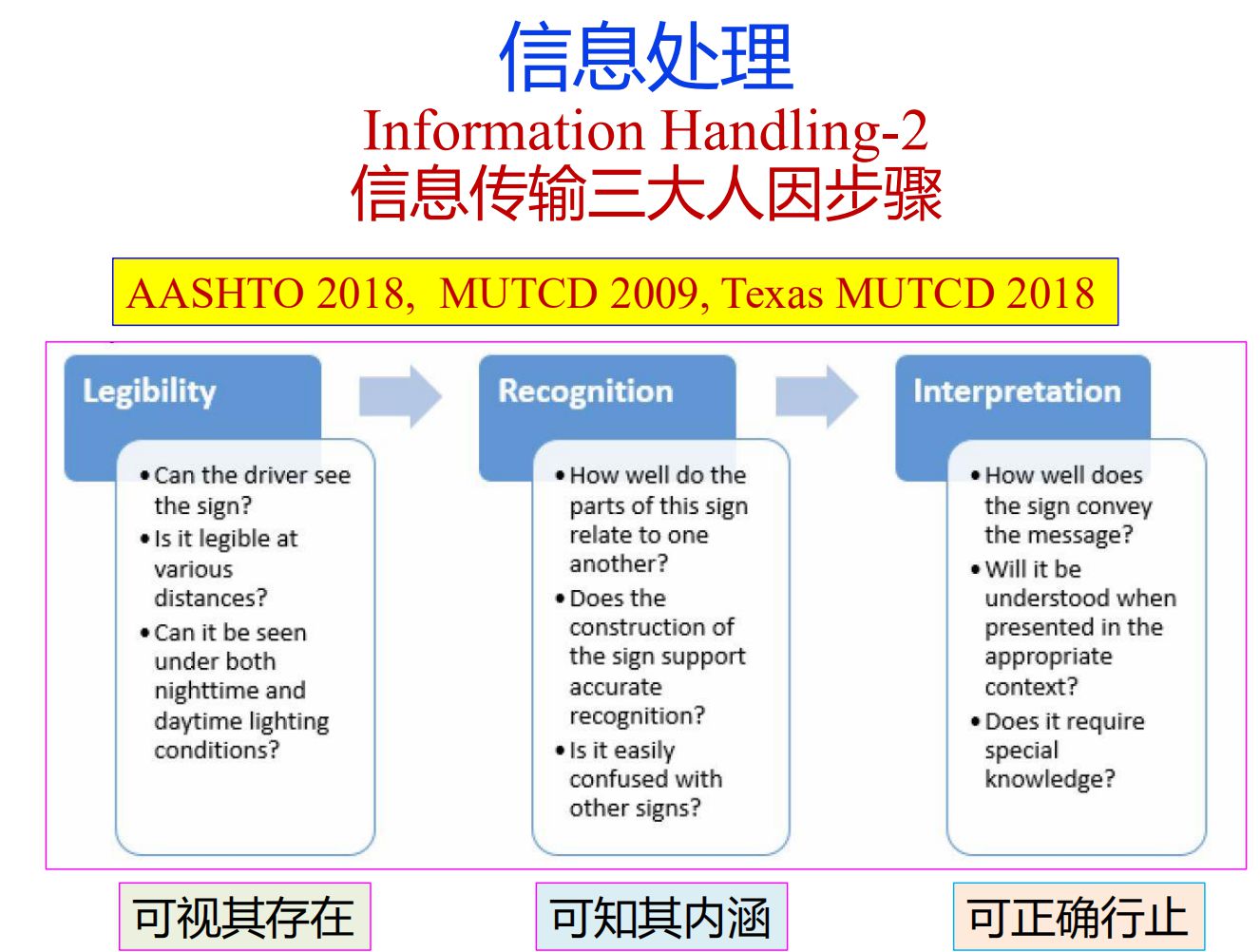
图18 信息处理三大步骤具体内容
针对国内的一些智慧道路,如三级诱导系统,驾驶人是都都有足够的时间可以确实认知并反应。因为信息变化会促使驾驶任务的负荷大大提升,所以需要思考这些系统是否合适驾驶人。驾驶人吸取信息后,会本能选取相对重要的信息,在极短的时间内做出本能的必要反应。因此,道路上的任何设施都不能有Dilemma现象,让驾驶人进退两难。
道路交通工程规划设计领域的Dilemma会影响驾驶任务的正常运作,因此道路交通事故具有突发性和瞬间性。如果驾驶人对路权、几何线形、交通控制方面或者视线有Dilemma现象,整个驾驶都会存在问题(图19)。同时,驾驶任务需要考虑车辆速度,且速度、时间和距离三者须同时考虑,所有的规划设计都要与秒较真。
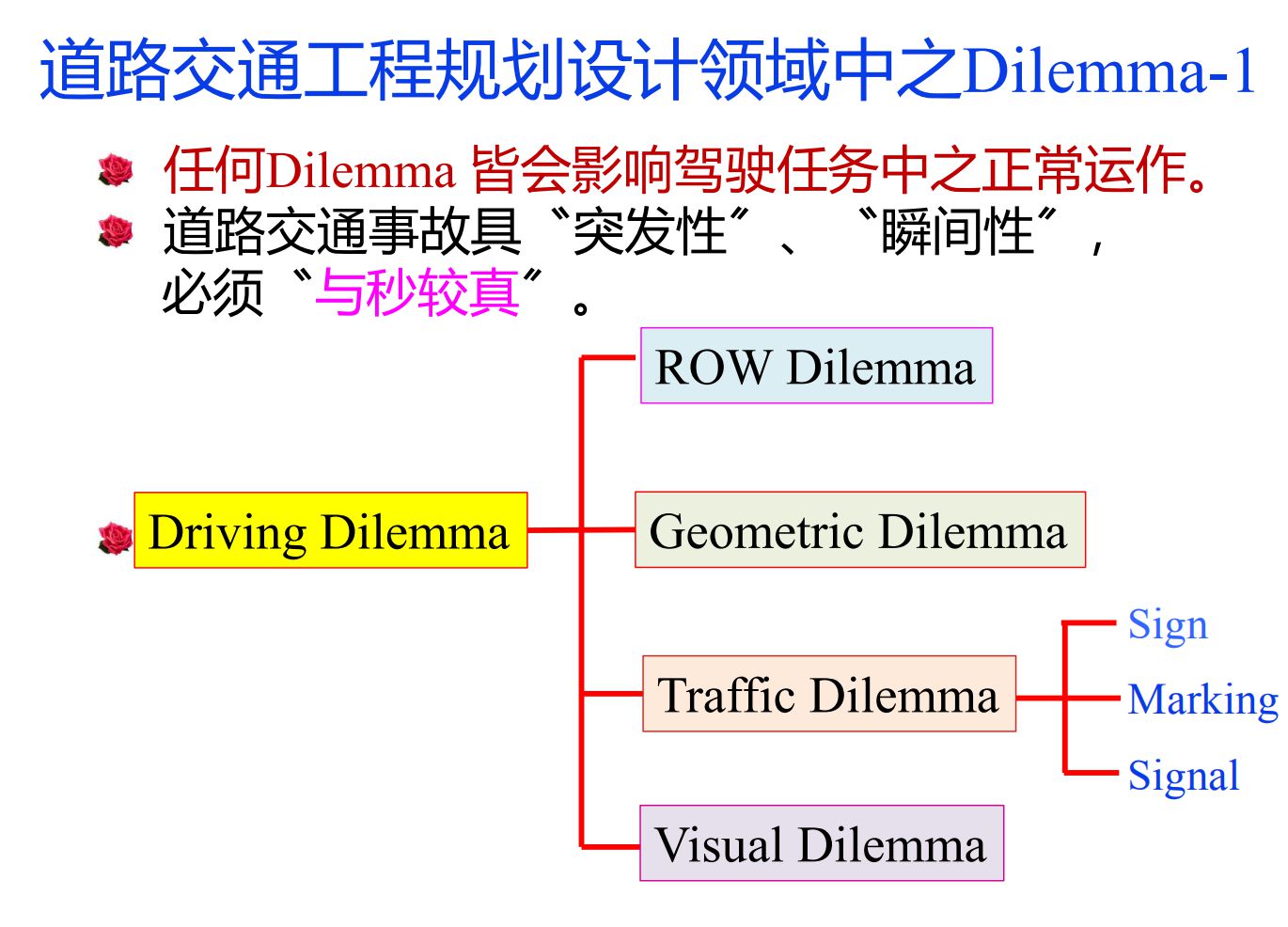
图19 Dilemma现象具体内涵
6.2 驾驶任务之各种次任务
驾驶任务分为控制、引导和运行三大主任务,还可以再细分为各项次任务,比如视觉需求、方向盘掌控、速度选择、车道维持、跟车、变换车道等。三大驾驶任务衍生出的各次任务,体现在道路交通工程规划设计细节中,表现在五个主要领域。这五大领域在美国主要为:AASHTO的绿皮书、HSM、路侧设计指南RDG、与标志标线相关的MUTCD、与通行能力相关的HCM,这五大部分相辅相成,共同完成道路的安全、移动等功能(图20)。
道路交通工程规划设计者可依据各次任务审视细节。驾驶人有责任进行自己的驾驶任务,但是路上的标志标线信号灯等是道路交通主管地方的责任,两者是需要各负职责。将美国的五大领域与国内进行比较,需要做到师人之长、弃人之短。美国的规范虽然发展得很成熟,但是也有一定的缺陷,因此国内在进行学习的时候需要进行梳理。
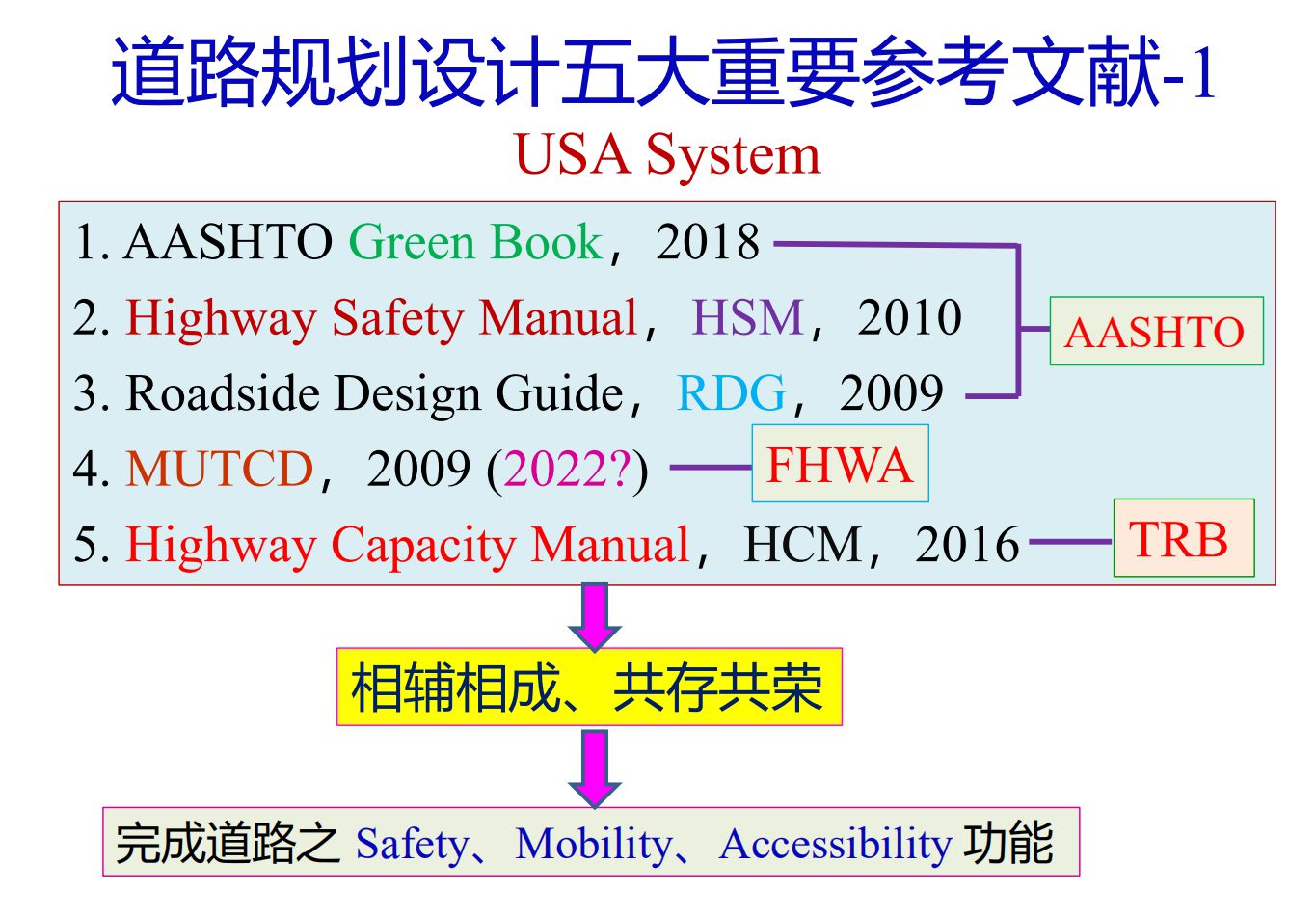
图20 道路设计五大重要参考文献
6.3 驾驶任务与道路路网
6.3.1 道路路上设计速度思维
一般讲到设计速度,可以划分为高中低三个思维,不同地区的设计速度也不尽相同(图 21)。道路规划设计为什么要有高中低的设计思维,主要是驾驶任务内涵不同、驾驶人驾驶负荷不同、规划设计考虑的细节不同以及道路完工的管养作业内涵不同。
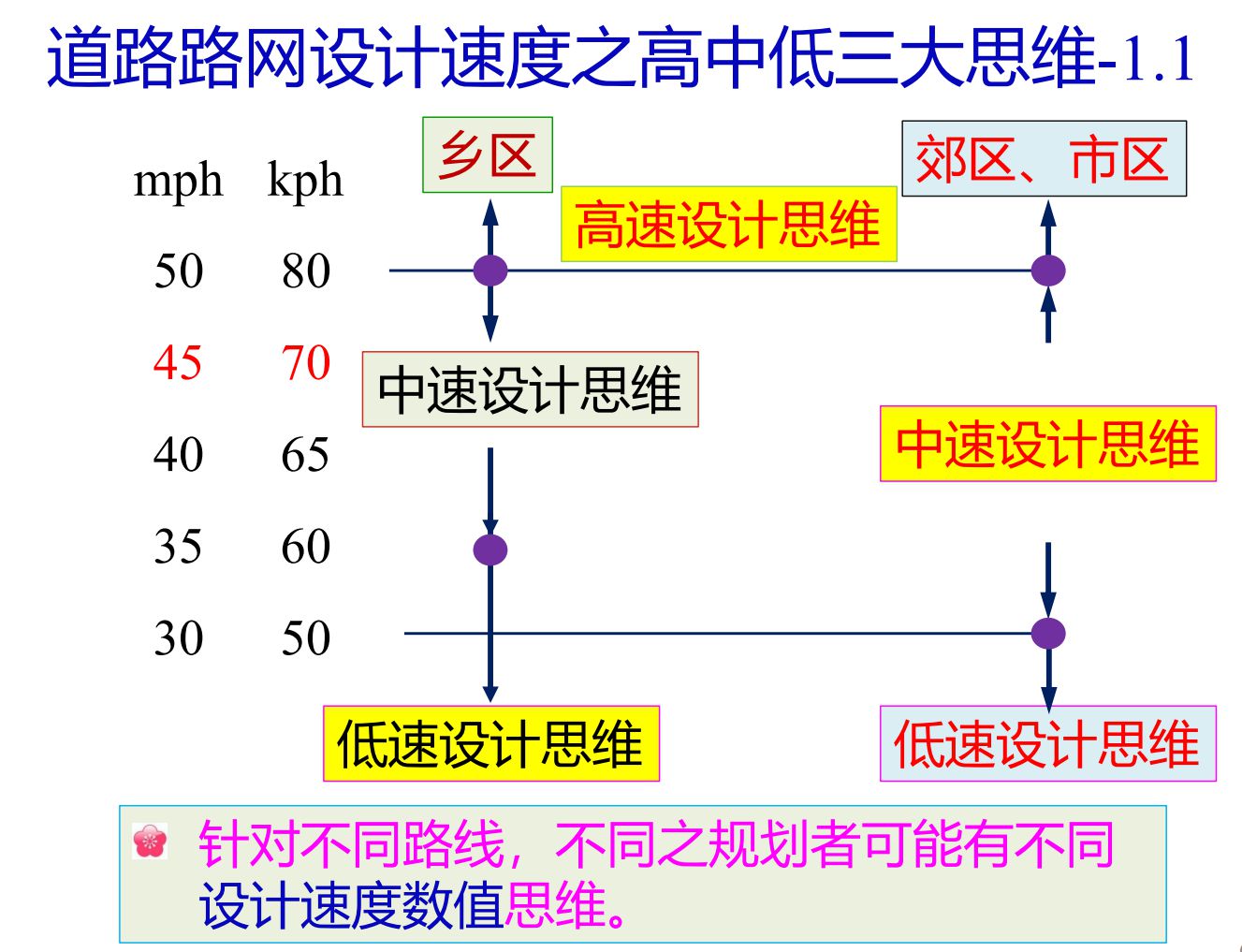
图 21 不同地区的设计思维
有一个名称叫做速度阶层,沿某长路段或路网,设计速度增减一阶的数量。在美国规定为5mph,相当于10kph,国内用的是20kph。为什么使用5pkh,主要是考虑到驾驶者的负担,不能让驾驶者负担太大。速度阶层理念可以用在设计速度渐变、限速值渐变及速差理论。国内从120km/h变至100km/h的变化就太大了,相当于美国的两个速度阶层。速度阶层的理念可用作设计速度渐变、限速值渐变及速度差理论(图22)。
美国MUTCD建议限速值一定要在车道V85的正负5%左右,通车后,需要通过HDM(道路数据管理系统)才能确认。在国内,高速公路没有110和90,一级公路没有90和70,速度阶层太大,建议可以进行渐变处理,从100过渡到90最后到80。
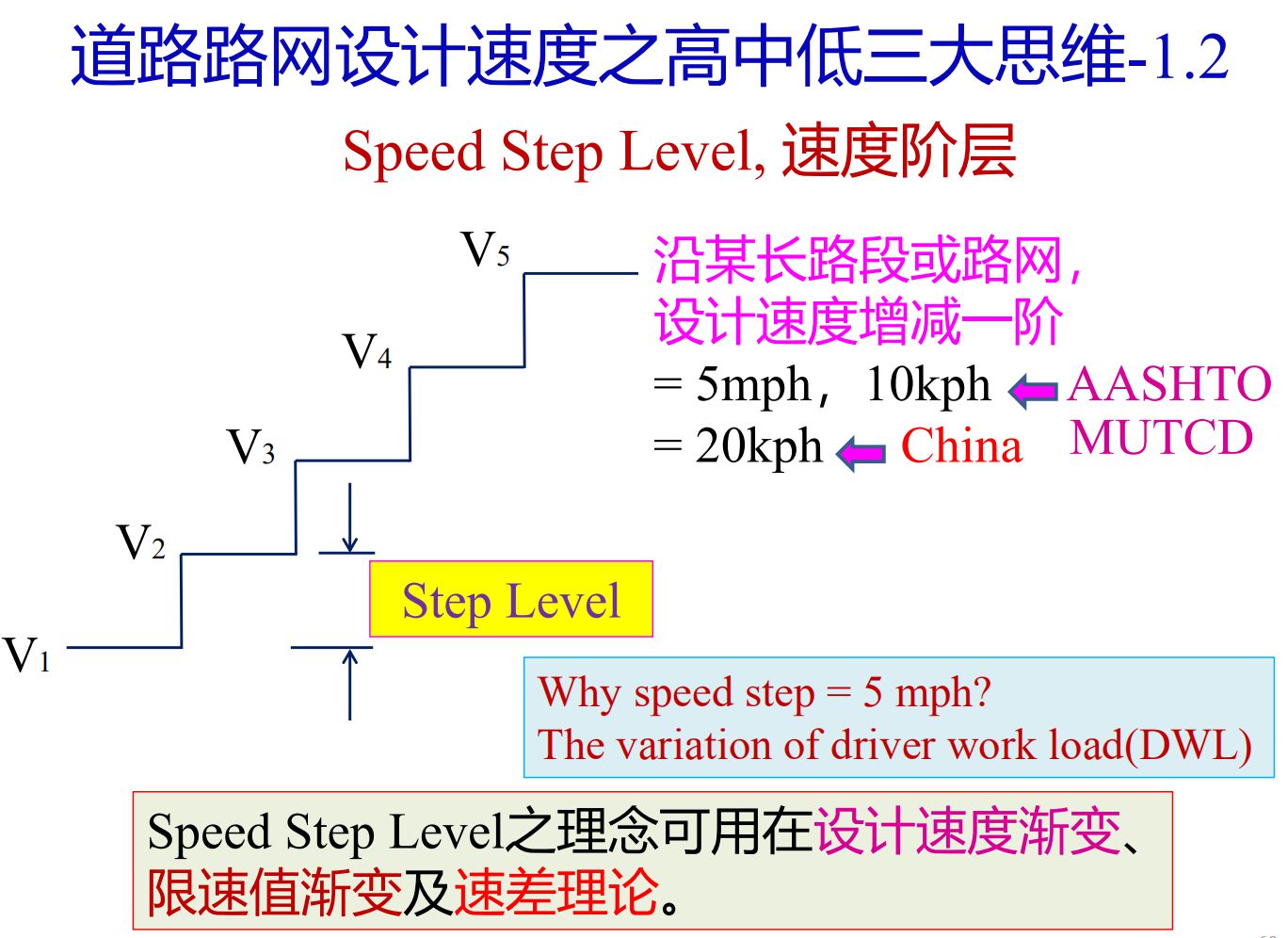
图22 速度阶层
那么设计者可以在设计速度时采用内差法吗,答案是否定的。速度变化并不是线性的,没有办法采用内差法。国内的快速路也是存在这样的问题,70kph漏掉,这是很重要的一个速度限制。将美国和中国的设计速度进行对比,发现中国缺少70、90和110km/h的速度,而且速度阶层太高。70kph属于中高速度,在道路路网设计中占有极为重要的角色。
美国一定有实际速度和设计速度的比较,在45mph约等于70kph的地方是一个分界点,在分界点之后两者之间的差距越来越大。AASHTO中提到,设计速度越高,需要用速度管理去验证和补足的需求就越高。高速公路和快速公路的限速是可以更改的,但是更改次数一两年只能有一次。在70kph以上,需要设立中央实体分向设施(国内的一些隔离栏不是实体隔离),路段中不应该有行人穿越设施,城市中公共运输的营运力度应该增加、路侧安全设计应该加强(图23)。45mph是MUTCD的具有警示目的标线的分界点,在同一类型道路条件下标线绘制内涵不同。
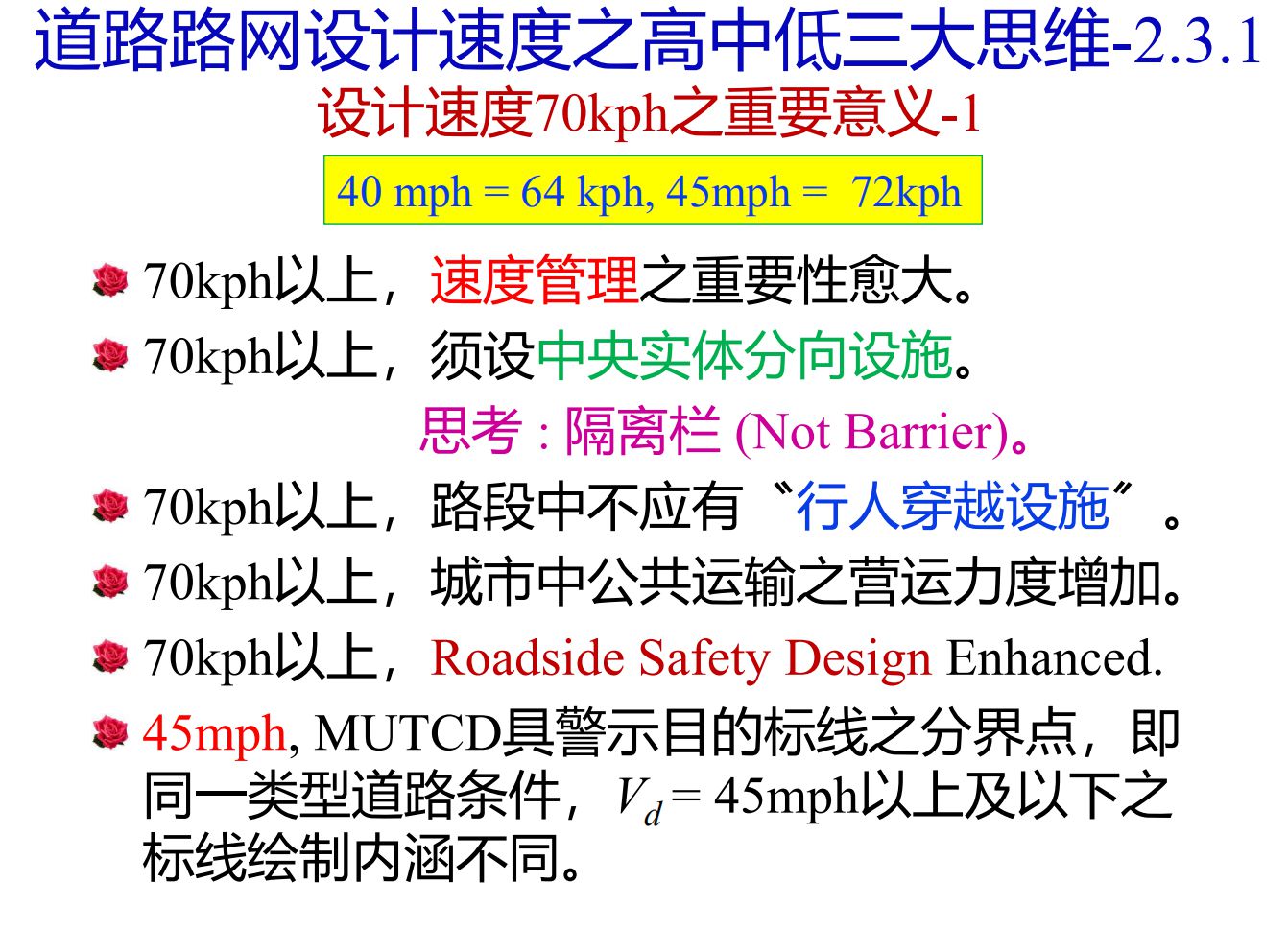
图23 设计速度70kph的意义
AASHTO发布的绿皮书中提到双向四车道及以上车道数的道路最好有分向设施,佛罗里达DOT提出设计速度40mph以上的多车道道路必须有分向设施。因此,国内的一些双向6车道中间只设置双黄线,这样是不合理的。另外佛罗里达DOT发布的Median Handbook提出多车道道路设计速度40mph以上必须要有凸起式实体分向设施和防护式分向设施,这样设定是由很多数据支撑得来的结果。国内的一些车道路较多的道路中间采用隔离栏是不合理的,而且国内的一些道路没有必要设计这么宽。凡是设计速度在70kph以上的多车道布设实体分向设施是需要深入考虑的。MUTCD对于45mph以上或以下的标志设计都是不同的。
同时,道路路网还需要考虑层次性。合理的区域道路路网需要有层次性,即合理的位阶差,比如高速公路接快速路,快速路接干线道路,再接入集散道路,两路交接必有道理可循,这个道理是阶差理论。优质的道路路网可以满足所有驾驶人的驾驶路径,国外的路网是可以检验设置是否合理,用驾驶情节任务分析(TADS)进行检验。
6.3.2 路网结构合理性
道路路网结构要合理,道路软硬件设施要完善,这样驾驶人才能够去驾驶,完成驾驶任务。举个例子,如果这个路口时畸形交叉口,然后要求驾驶人要善尽驾驶之责任,这就太牵强。因此,驾驶任务应该是轻松,平等是任务,而不是把它变成一个惊涛骇浪的战场军事任务。所以我们需要去思考很多事故的发生是不是因为违背了大道至简的原则;有些道路设计和路网组成是不是有可能太复杂。
道路交通工程设计者天下大事必作于细,做到细致没有错。可是当用路人要用的时候发生“天下难事,当终不易。”因此,任何强大的群体也无法全然照顾到脆弱之个体。过度复杂之道路工程设计,让交警严防死守固然没有错,但是这是在将民众的血水转变成交警汗水,大家都会很辛苦。信号灯设计无法作为收拾畸形路口残局之利器,这是错的方向和方法。针对畸形路口如果条件可以就去整改;如果实在是不能整改,再想其他办法。但是千万不要去用信号灯设计来收拾残局,这就是错误的方向。
驾驶任务的探讨是需要具备前提条件,即:各组成道路本身之交通功能明确、通行能力合理、几何线性合规、横断面布局正确。两条道路之交叉、交汇条件应符合道路交通工程设计原理。无畸形路口、交流道。符合道路路网结构合理性的前提下(图24)进行的交通控制作为才有实质意义。不能一味的要求用路人遵守什么的准则,首先要构建合理的路网结构。
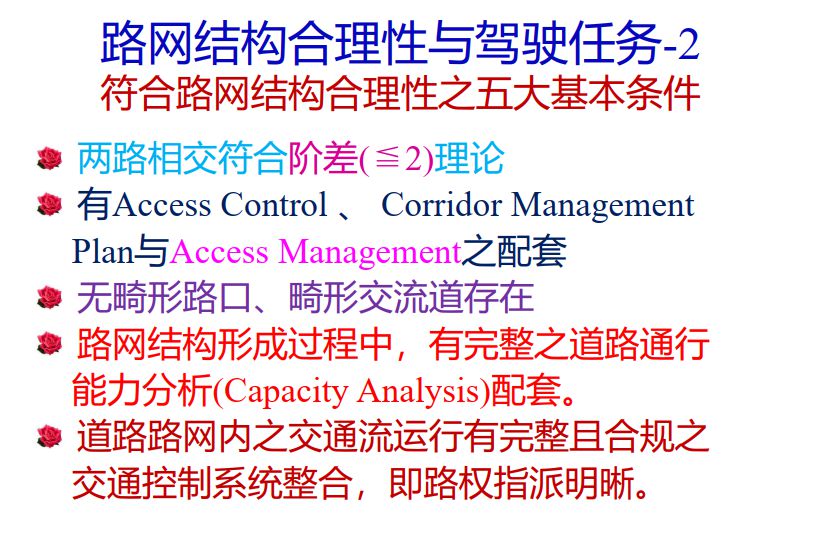
图24 合理路网的基本条件
原符合阶差理论之路网,在路网密度增加后,反而乱套。短距离连结,形成更复杂路网,会产生布雷斯悖论(Braess Paradox)现象。在一条路网上新增一条道路,路网上车辆之平均旅行时间反而增加,即Delay增加,服务水平下降。这就是Braess Paradox现象。如下图所示,交通功能八位阶包括在Access Design中。Access Design指的是corridor management 和access、management。如果一个路网满足道路路网的八阶交通功能,就能够达到易行性和可及性(图25)。
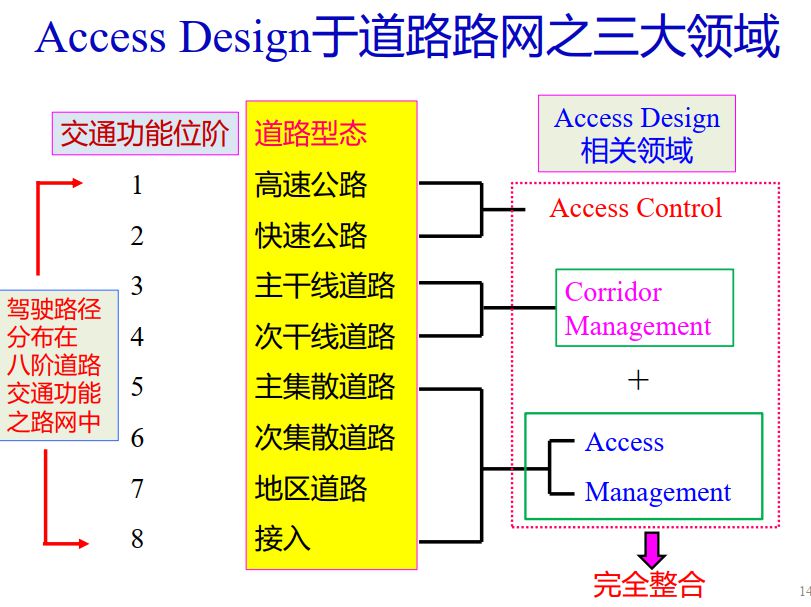
图25 交通功能位阶与Access Design
理论上,高速公路应该远离城市,利用连接式道路来连接这个城市。如果高速公路穿过这个城市,如果这个城市扩大了,那高速公路基本上就废掉了。因为高速公路的功能跟城市道路功能混杂在一起了。高速公路如果穿过城市的话,很多驾驶人就会利用高速公路的那个出口匝道直接过来。也就是驾驶人可能为了闪避信号灯路口,取巧上高速公路争取时间,不计较行驶距离。从而造成信号灯区域路网之正常功能下降。内、外部交通要避免产生纠结现象,不合理的道路链接,破坏区域道路路网的整体功能。
6.4 驾驶任务与视觉
驾驶人任务与人体的五大器官之间有紧密联系,双手用于控制方向盘,右脚用于踩刹车和油门,双眼需要用于视觉识别,脑和心不能有Dilemma,双耳需要听,驾驶人和规划者都需要负责;五大器官各司其职。人的中枢神经掌控一切,因此酒后驾驶会让人失去控制,其中视觉占85%-90%以上的获取道路相关信息。
道路设计的视觉需求,标志标线和信号灯是最重要的,道路本身的结构及几何线形都能为驾驶人提供最基本的视觉需求。道路交通工程规划者需要满足驾驶人的视觉需求,就涉及到视距和视区。视距是驾驶人能看到最远的距离;视区是驾驶人看的广度,两者的观念不同(图26)。在实际道路中,因视距视区不足导致事故发生的案例很多。
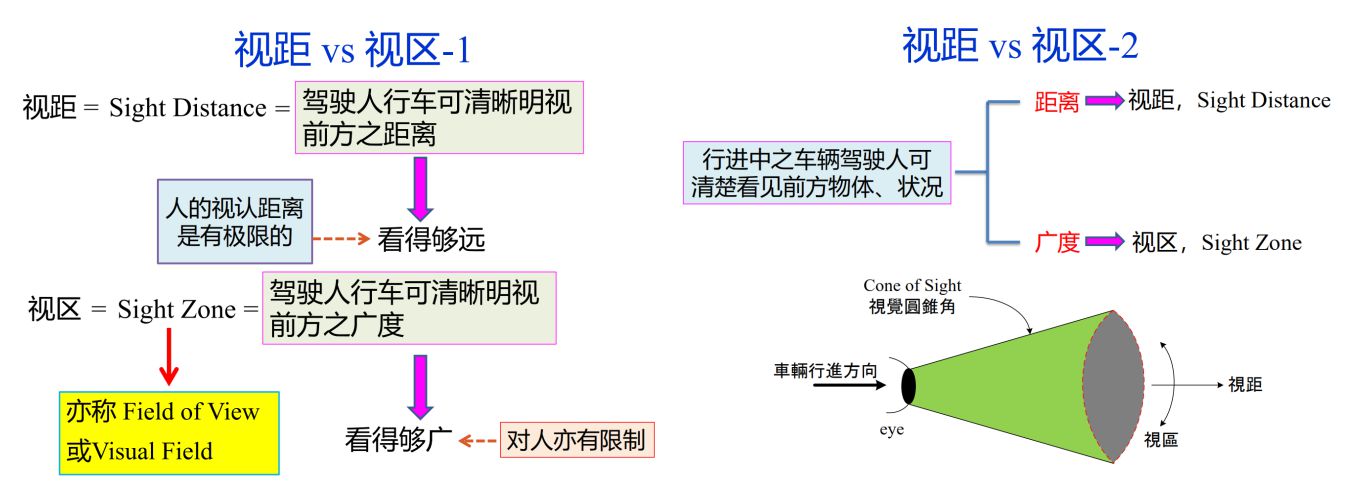
图26 视距和视区概念对比
在长隧道内禁止变换车道是因为驾驶人的视区具有三度空间的特征,但是隧道内是密闭的,有些隧道禁止同行向车辆变换车道是考虑到视线和视区不足,路侧条件受限。70kph是非常重要的,速度不一样你所看到的视野是不同的(图27)。视错觉,是指你所看到的跟你心里面所想的,跟外面的世界不一样,两者没有契合,就会产生视错觉。对于道路而言就不能存在这样的现象。如下图所示跟道路设计相关,视觉的重要名词,需重点关注和参考(图28)。
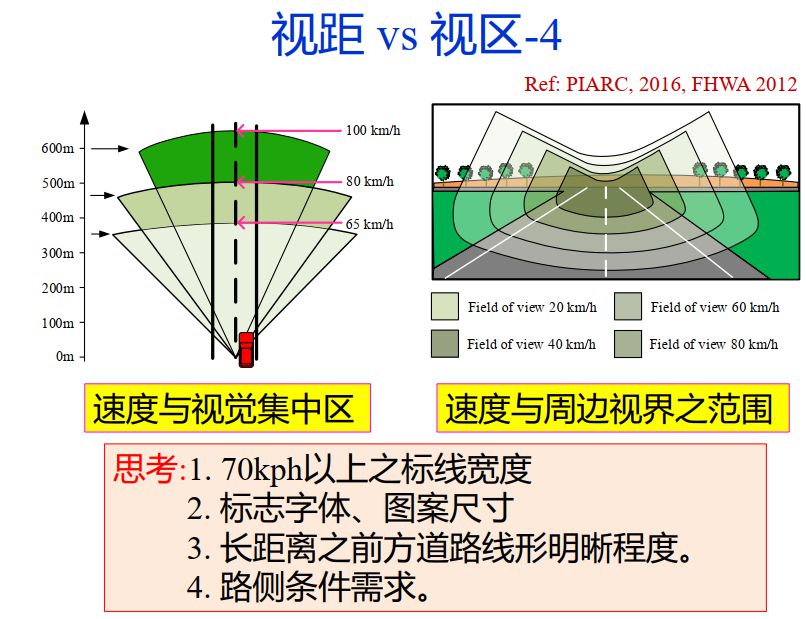
图27 不同速度下的视距和视区范围
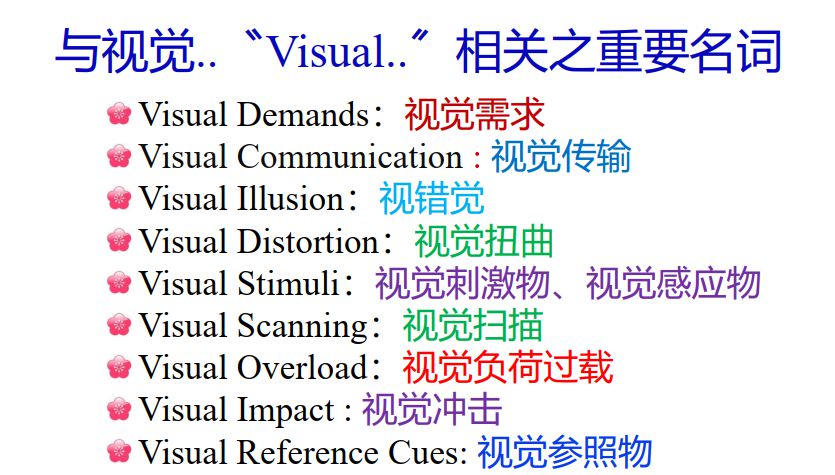
图28 道路设计相关的视觉的重要名词
驾驶任务不是一个人的事,别人会影响你,别人也会影响你。车辆之间会有互制效应。Interaction between Vehicles 是跟Control和Guidance相关。标志指引也会影响驾驶任务。因此,车流具有时空变化特性,时间—速度—距离三位一体,最典型的就是Slinky Effect和Butterfly Effect。
6.4.1 视觉应用
挡风玻璃设计是从视区和视觉需求的概念出发,挡风玻璃的面积就是新的视区。道路工程设计者必须掌握视觉需求的概念。驾驶人有责任主动了解所驾驶车辆的各种后视镜的正确运作。左后视镜、右后视镜在前行和变化车道中扮演着重要的角色,各有功能。如下图所示,开车在交叉路口,是可以转头的,当车进入入口匝道的时候也可以勉强转头,但是进入主线后驾驶人没有办法转头,只能利用车内后视镜、左后视镜进行观察。车子的性能、车子的设备、道路设计是一体的。交叉路口尺度的范围是75度到105度,当然90度是最好的。75度到105度的含义就是90度的正负15度,这个15度就是考虑驾驶人转头用的。交叉口的角度太斜,驾驶人转不了头,如果转头看反而更危险。某些地点必须转动头部辅助,但转动角度必有限制,不需要身体也转动(图29)。
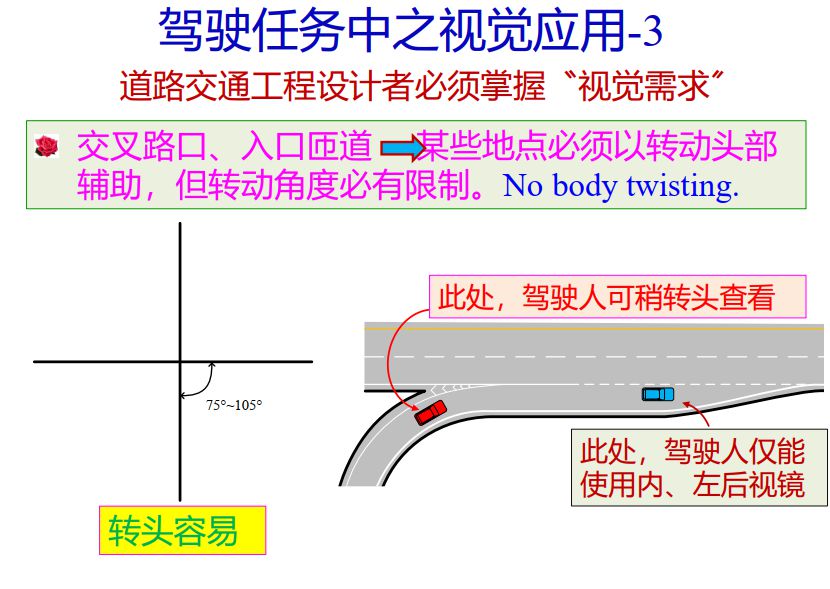
图29 视觉应用之交叉口
区位环境不一样,路侧环境就不一样。例如城区和乡下的照明环境不同,道路交通工程规划设计者应该因地制宜。视距、视区是重要的因素。沿驾驶路径上任何一点,皆必须满足视距、视区的设计原则。视距、视区的品质越差,DWL就越大,就容易发生事故。同时,车型不同速度运行特性不同,加减速也不同。车辆的行进轨迹不同,驾驶人的视距、视区条件不同。所以这就会牵扯到车道配置、速度管理、交通控制和渠化设计等。不同车种、不同驾驶人、不同情境下道路交通环境千变万化,驾驶人进行驾驶任务的困难度也是在时刻变化。因此,不能分心驾驶。
6.4.2 道路平面线性与驾驶人的视觉感知
直线段、但曲线段、直线+单曲线段、直线+缓和曲线+单曲线段者几种道路组合线性的设计使驾驶人在开车时的视觉感知中比较平缓。道路结构是一个三度空间的道路结构,只要遵循相关设计规范的要求,道路线性给驾驶员的视觉感受应该都没问题。
道路曲折现象没有办法改变,只有采用交通工程辅助,例如设置信号灯。几何线性不达标,应以修正线性为优先考虑,交通工程手段辅助次之。交通信号灯的设置应合理,设置不合理也容易导致其他问题的发生。
6.5 驾驶任务与驾驶负荷度
执行驾驶任务之困难愈大,代表驾驶(工作)负荷度(Driver Work Load,DWL)愈大,安全隐患率愈高。DWL太大之现象,亦可能是道路交通规划设计与管理者无心造成的结果。如果有长期的事故历史数据进行分析就会发现畸形路口的事故率和违法率最高,这就是跟驾驶(工作)负荷度有关系。
DWL是一个概念词,可相对比较不易绝对化。DWL可以拆为两个部分,DIL(Driver Information Load)和VCL(Vehicle Control Load)。DIL是指信息负荷,包括标志、标线和信号灯设计。也就是指驾驶任务中的“Guidance”和“Navigation”。VCL指驾驶负荷,也就是驾驶任务中的“Control”。如图30所示,如果这是一条正常且合理的道路,驾驶人在开车,负荷度越来越高,甚至超过驾驶人的负荷度,那么这个地方一定会比较容易出现事故,因为驾驶人是有负荷极限的。DWL越高,代表驾驶人完成驾驶任务之程度就越低,则事故风险必越高。可以通过长期事故历史记录可进行反馈比较。ITS(Intelligent Transportation System)设备可以降低驾驶人的DWL,但是不要期望ITS设备可以让驾驶人平稳驾驶。科技设备可以帮助驾驶人,但是不要期望它能够取代驾驶人。
DIL如果太大,就会产生DIO(Driver Information Overload)现象,DIO现象就会产生DWL。DIO现象是指驾驶人无法有效视认、识认。未能采取合宜应对的作为,就会反应时间不足。最终就是会导致DWL太大,因此它们之间时相通的。
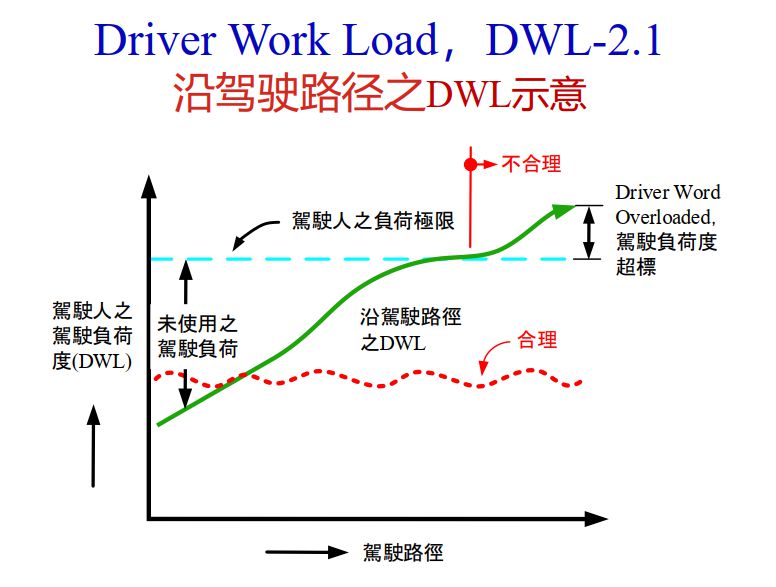
图30 驾驶负荷度与事故的关系
6.5.1 标志信息量
一个标志里面Unit应该有哪些,应该放多少标志都是需要进行思考的。2008年-2009年,相关研究表明,两块标志板的时候,信息量最好在12个之内,最多不要超过16个。三块标志的时候信息量最好在18个以内。2018年,MUTCD对标志的信息量进行了修正,该准则是目前美国公路设计的参考(图31)。例如,两块板信息量最好是12个,最多不要超过16个,三块板的信息最好是16个,最多不要超过18个。信息传输是有量的限制,标志上放太多内容,驾驶人也无法获取信息。因此,针对中文标志,我们应该思考要怎么进行设置。
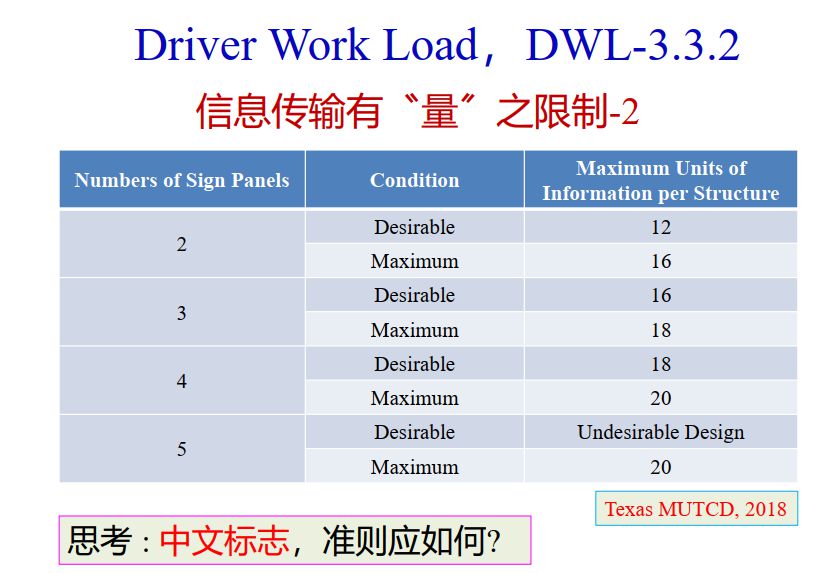
图31 MUTCD标志信息量准则
标志的信息量超过了DIO原则,则违背了Human Factors之后,在深论驾驶任务,就没有意义。Human Factors是一个非常重要道路设计考虑因素。同时,标志尽量采用正面表列。在道路设计中要思考什么样的情况下采用正面表列;什么样的情况下采用负面表列。
6.5.2 Hysteresis Effect (理滞效应)
Hysteresis Effect(理滞效应),指人的驾驶负荷降低之后就会放轻松,但是没想到在轻松之后就发生了事故(图32)。交叉口转向动线的统计发现:下游端的事故必然多于上游端。造成此现象的原因就是Hysteresis Effect。因此,越复杂的交叉口转向动线,经过长期统计可以发现此效应非常明显。如果想要知道道路交通工程设计中是否有DWL的超量现象,除了引进道路安全审计以外,还需要有长期的事故历史记录,进行相关分析,就可以了解和确认DWL过量与事故率及严重性之相关程度。

图32 Hysteresis Effect(理滞效应)内涵
6.5.3 车流型态
从服务水平来看,美国按照的是ABCDEF,国内是123456,六者之DML谁最大,与道路交通功能位阶是否有关,如图33所示。一般在D跟E处DWL最大;平均运行速度越来越低,道路拥堵接近于0,但是此处的驾驶负荷度最高,车流状态驾驶负荷度最高。
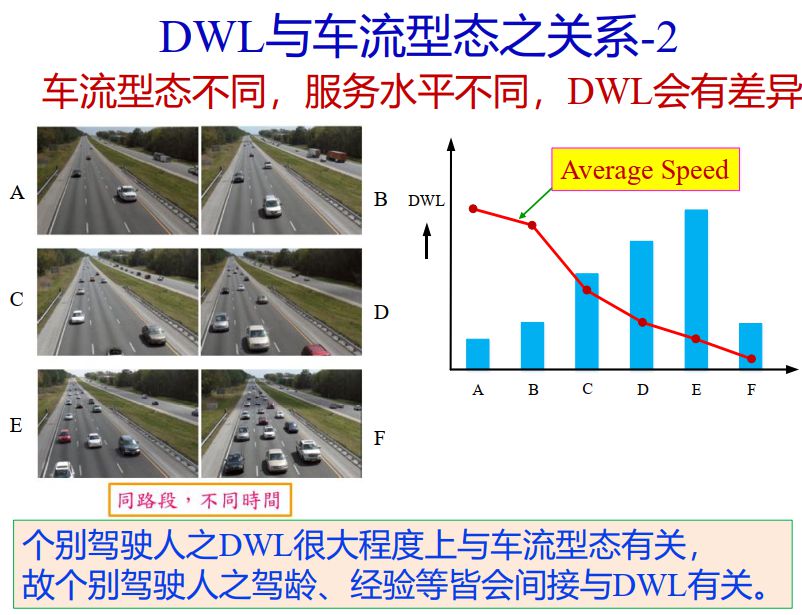
图33 DML与车流型态的关系
6.5.4 实体中央分向设施
在实体中央分向设施中,如图34所示右图的DWL比较低。右图采用中央分隔带,驾驶人在驾驶过程中比较放心。左图采用双黄线,驾驶人会担心有行人冲出来。因此,当速度大于60kph时,设置实体的中央分向设施,可以降低驾驶人的DWL。实体中央分隔带,能够降低驾驶人的驾驶负荷。
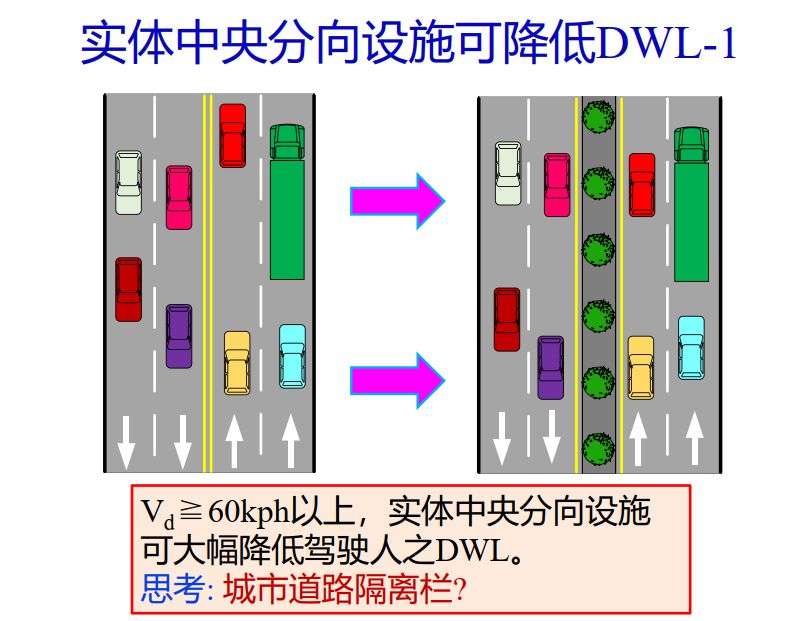
图34 实体中央分向设施与驾驶负荷度的关系
6.5.5 道路景观
道路景观有三景:远景—中景—近景,三者之中不能过分强调近景。同时也不能过分强调景观护栏设置,以及分隔带的景观植栽,不利于驾驶人减缓DWL。
6.6 驾驶任务与驾驶情节任务分析
驾驶任务(Driving Task)是一个系统性概念名词,可以延伸、进阶道驾驶情节任务分析(Task Analysis of Driving Scenarios,TADS)中,从而可以探讨驾驶任务的细部历程,最后落实到道路交通工程设计的细节上。驾驶任务和防卫驾驶是两个概念,两者存在不同。当驾驶人进行驾驶任务时,应时刻保持防卫驾驶的思维。完全驾驶包括安全驾驶和防卫驾驶。安全驾驶是指驾驶人自己要有安全驾驶概念,要求自己确实执行驾驶任务,遵守交通规则。防卫驾驶是指防范他人。两者合在一起才叫完全驾驶,因此有驾驶能力不代表有安全驾驶能力。ITS设备可以帮助进行安全驾驶。
驾驶情节任务分析(TADS)包括五个部分的内容,即:直线段、曲线段、交叉口、匝道等。在符合Human Factors的前提下,从用路者的角度规划设计道路设施。同时也要思考如有事故发生,可能会如何发生,要了解容错设计和实质安全。(图35)

图35 驾驶情节任务分析(TADS)对道路设计的意义
6.7 驾驶任务与路侧安全设计
路侧危险因素与安全设计中,驾驶人必须与路侧设施有互动,这也是驾驶任务Guidance的一部分内容。道路设计需要注意什么样的行道树对速度有影响,要不要做保护措施。道路交通工程设计的侧向净距的考虑主要原理是基于安全之前提,驾驶人可从容进行驾驶任务;任何道路都要有侧向净距的考虑。路边线与旁边的障碍物要有一个距离,这就是侧向净距。如果没有侧向净距,这个空间就浪费了,因此侧向净距非常重要。
侧向净距与人因理论,会考虑Shy Away Effect。道路范围内不少刚性结构物都具备合法性,但同时也具备安全威胁性。驾驶人明视眼前障碍物,会自然回避的自然现象。道路交通工程规划设计者应考虑Shy Away Effect的功能。传统的路侧净区设计理念不适用于城市道路,需要加以修正。由原来的Clear Zone 降低为Reduced Clear Zone,这是Lateral Offset的理论基础(图36)。在进行道路设计的时候,需要从路侧安全设计的概念入手。
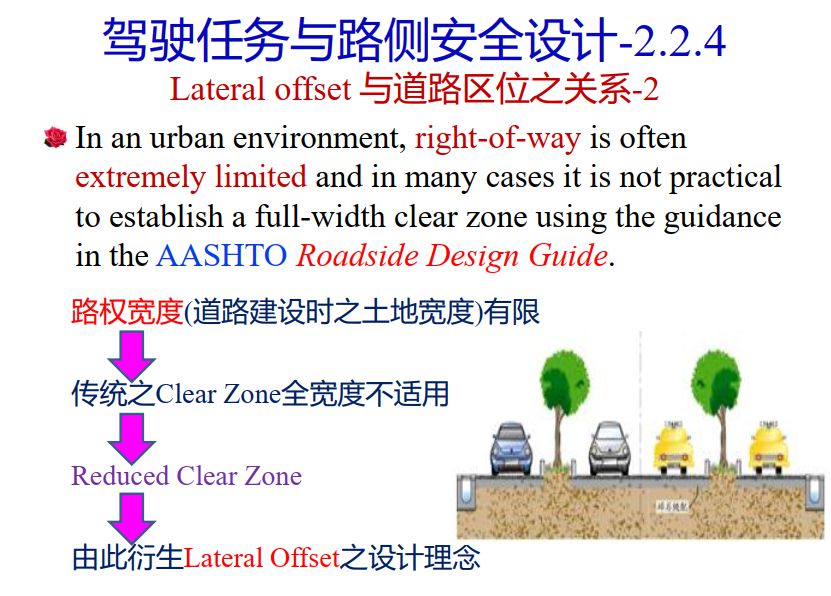
图36 Lateral Offset与道路区位的关系
6.8 驾驶任务与速度管理策略
在驾驶任务中速度管理是一个重要的概念,进行速度管理可以降低DWL,辅助驾驶人完成驾驶任务。限速制定原则会减少事故发生,但是限速值的制定要满足时间管理、伦理原则、路网情况好才能提高限速值。
6.9 驾驶任务与交通标志
标志的布设位置、标志的内容与驾驶任务是息息相关的。道路标志的基本要求包括:需要性、醒目性、易读性、权威性、公认性、一致性和实用性。其中实用性就是跟驾驶任务紧密相关的。路径指引非常重要,需要具备良好的硬件和软件体系,才能完成驾驶任务。任何标志都要遵守:预告点、警戒点、行动点、告知点和确认点这五个要求(图37)。一般而言,标志标线都有的前提下,标线应提前设置,两者应错开。
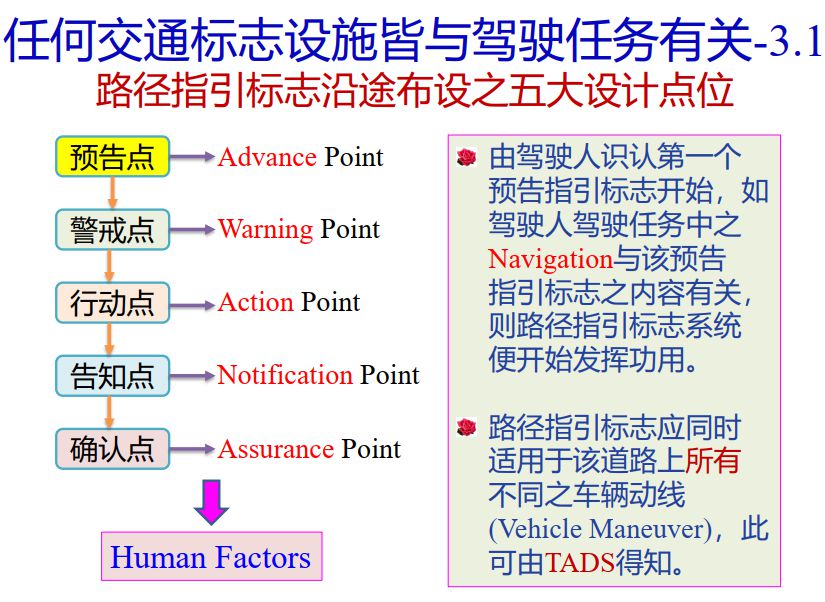
图37 路径指引标志的设计点位
如图38所示,该例子说明此道路的标志设置就是满足预告点、警戒点、行动点、告知点和确认点这五个要求。如果标志遵守这五个原则,预告指引标志将会设置的非常清楚。
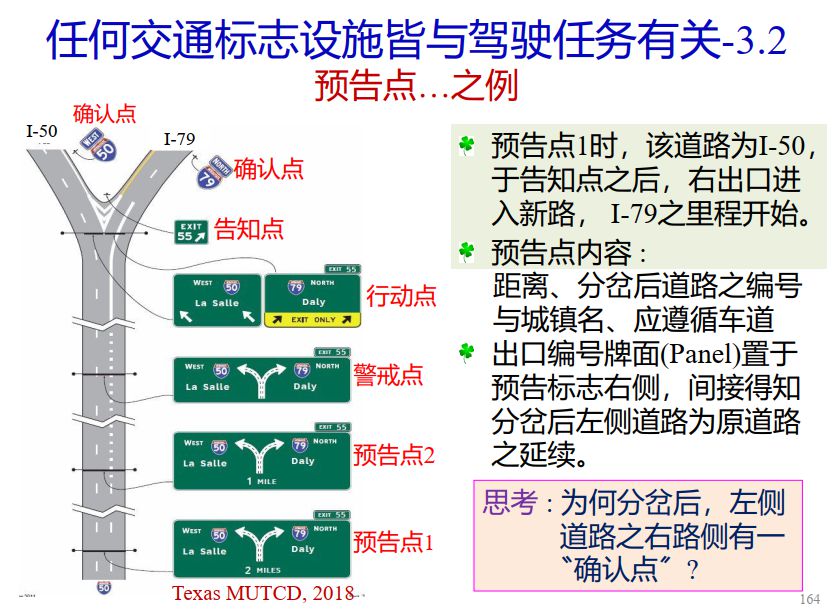
图38 路径指引标志设置位置示例
7 路权与人因
道路交通工程规划设计必须适应人,不是人适应道路。这个“人”是指一般正常的人。违背人因的道路设计,用路人也不会遵守交通规则。路权与人因的内涵,须要于人本相通、自解释道路的规划设计理念完全相融合。用路人的路权必须清晰明确,道路的软硬件有问题,不能期望用路人全然遵守路权,就如图不能期望有病的人和健全的人有相同的体能。另外我们还要明白程序正义的理念:先有路,才有人和车。路没有问题了才能谈及路权;具有争议性的道路,没有资格谈论路权的。道路是可以被用路人批判的。
7.1 通行路权与驾驶任务
驾驶任务(控制、指引、运行)必须在路权的框架内进行谈论。驾驶任务加上路权,跟交通的相关法规和道路交通工程设计原理完全是互通的,没有互相违背,是结合在一起的。道路交通的路权准则,即道路交通法规的任一条文,背后应有完整的科学理论支撑。路权的制定者以中央政府为主,即全国一致的规范,例如国内的GB768、美国的MUTCD。理论依据是交通工程与管理的科学原理。用路人有权利,同时也有义务和责任,受法律保护和约束。施行方法则是利用法规、交通控制设施、执法人员进行实施。
在设计道路的时候,就要想到所有的交通控制,要结合在一起,不能先做路再做标线。通行路权是指时间路权(对的时间),空间路权(对的地方)。只有先有通行路权,才能执行驾驶任务。路权不明,驾驶任务就会混乱。路权指派:标志系统、标线系统、信号灯系统、法规系统构成交通控制系统;交通控制系统就可以进行路权指派。交通控制系统与路权指派是完全互通的。(图39)
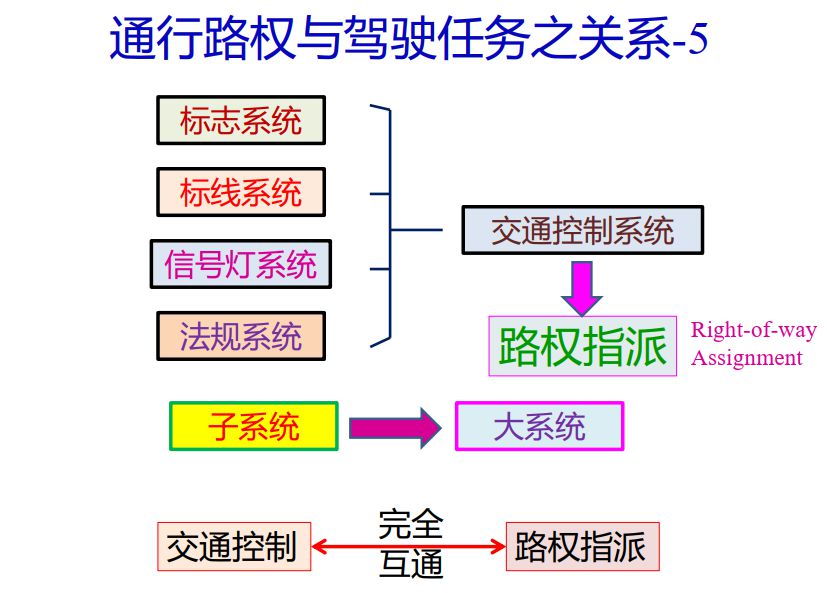
图39 路权指派系统
所有的交叉路口,尤其是信号灯路口,一定都要有指向箭头。如果没有指向箭头,就代表没有做路权指派。交叉路口停止线旁边,,,的指向箭头是有路权指派的作用。路权指派是很重要的概念,尤其是交叉路口更需要做到清晰的路权指派。
【“同路人”交通安全技术论坛简介】
“同路人”交通安全技术论坛由同济大学、公安部交通管理科学研究所、交通部公路科学研究院共同发起,依托交通安全学科创新引智基地(“111项目”)、道路与交通工程教育部重点实验室、道路交通安全与环境教育部工程研究中心、交通安全国际合作联合实验室、交通安全研究信息共享平台,就中国道路交通安全的重点问题展开深入讨论,推动国家道路交通安全科研水平的提升和应用技术深化。
从2016年开始,“同路人”交通安全技术论坛已经开展了如下主题的研讨:美国《统一交通控制设施手册》(2016年9月)、高速公路安全重点问题(2017年8月)、基于行为分析的营运驾驶人安全教育(2017年9月)、道路安全设计(2017年10月)、事故多发道路判别与改善(2018年8月)、速度管理(2019年5月)、人因与道路交通安全(2020年6-7月)、道路路网结构合理性与整改思维(2020年10月)、道路路网结构之“接入”规划设计理念(2020年11月)、路权之工程、法律意涵与实务应用(2020年12月)、统一交通工程控制手册(2021年6-7月)。
本次系列论坛主办单位为同济大学、公安部交通管理科学研究所、交通运输部公路科学研究院、“一带一路”国际交通联盟(BRITA)、上海市交通工程学会、上海市交通委员会科学技术委员会、中国公路学报、中国智能交通协会交通安全专委会。将邀请逢甲大学徐耀赐教授就“由驾驶任务进阶至道路交通工程设计”进行讲座,活动由交通安全学科创新引智基地(“111项目”)资助。