随着汽车保有量的快速增长,中国交通事故高发,道路交通安全问题已经成为全社会共同关注的话题,而追尾事故在事故总数中所占比例最高。针对追尾事故,前向避撞系统(FCWS:Forward Collision Warning System)能够有效地提醒驾驶员前方的潜在危险,辅助驾驶员更有效地避免碰撞、事故的发生。
对于一个设计良好的前向避撞系统,最核心的技术在于在何时、以何种方式向驾驶员提供预警信息,通常过早的报警通常易造成误报信息,降低系统的可信度而不被驾驶员接受,而过晚的报警可能会导致驾驶员没有足够的时间作出反应以避免碰撞发生。此外,驾驶员对于不同形式的报警方式的反应时间也不尽相同。
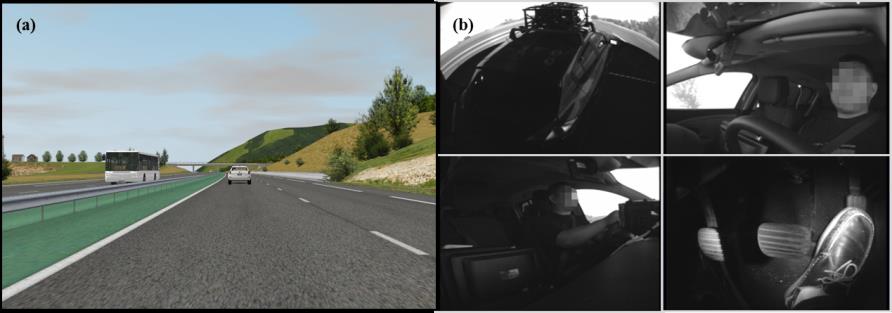
驾驶模拟器在发达国家被广泛应用于涉及驾驶员行为因素的研究,通过利用高度逼真的虚拟现实环境并灵活地根据需要改变实验条件,此类在驾驶模拟器上实施的驾驶行为研究能够在可控的实验状态下采集数据以支持实际预警系统的开发与设计。
建立了有效的报警算法;研究了报警算法是如何有效的帮助驾驶员避撞;分析了驾驶员对报警算法的接受程度并探究了改进报警算法的途径